一、现代控制理论阶段(20世纪50年代—70年代)
伴随着计算机技术的发展和航天技术的应用,自动控制理论转向多输入多输出、非线性、时变系统研究,以解决复杂的系统控制问题。
1954:贝尔曼(Bellman) 创立动态规划,解决多阶段最优决策。
1956:庞特里亚金(Pontryagin) 提出极大值原理,最优控制核心工具。
1960:卡尔曼(Kalman) 系统引入状态空间法,提出能控性/能观测性,标志现代控制理论正式诞生。
1960–1961:卡尔曼-布什滤波,解决随机噪声下的状态估计。
1965:扎德 (L.A.Zadeh) 提出模糊集合,模糊控制诞生。
1970s–1980s:鲁棒控制,H∞、μ分析,解决模型不确定与干扰问题。自适应控制成熟。
1980s:神经网络复兴、专家控制、分级递阶智能控制兴起。
1987:第一届国际智能控制大会,智能控制成为独立学科。
核心突破:从“外部输入输出”转向内部状态描述,适配多变量/时变/最优控制。
从1960–1970s,理论体系完善,涌现的分支理论有:
线性系统理论:极点配置、观测器设计、解耦控制、李雅普诺夫稳定性。
最优控制:庞特里亚金极大值原理、贝尔曼动态规划、极大值原理、线性二次型最优控制(LQR)。
随机控制与滤波:卡尔曼滤波推广、系统辨识、自适应控制等理论出现。
在航天(火箭/卫星)、导弹、工业过程的应用全面落地。
从1970–1990s,为应对不确定性,爆发的新分支理论有:
自适应控制:模型参考自适应、自校正控制,应对参数时变。
二、状态空间
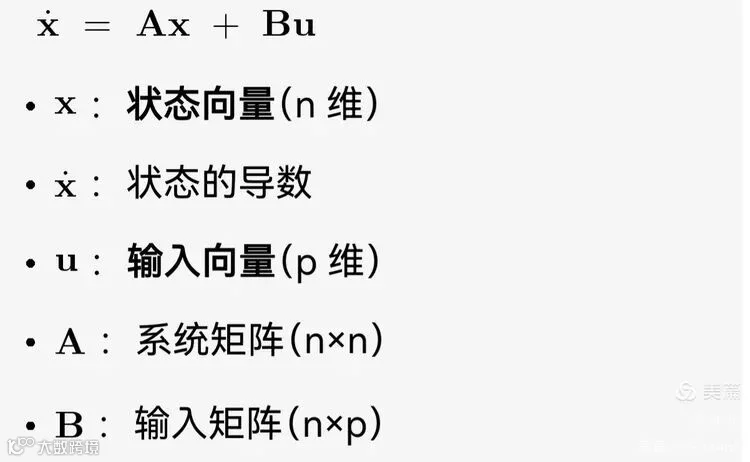
1. 状态:能完全描述系统当前运动状况的最少一组变量。
已知t₀ 时刻的状态 及 t ≥ t₀ 的输入→ 就能唯一确定系统未来所有时刻的行为。
例如:
弹簧质量阻尼系统:位置 x、速度 v → 状态变量。
2. 状态空间的描述形式
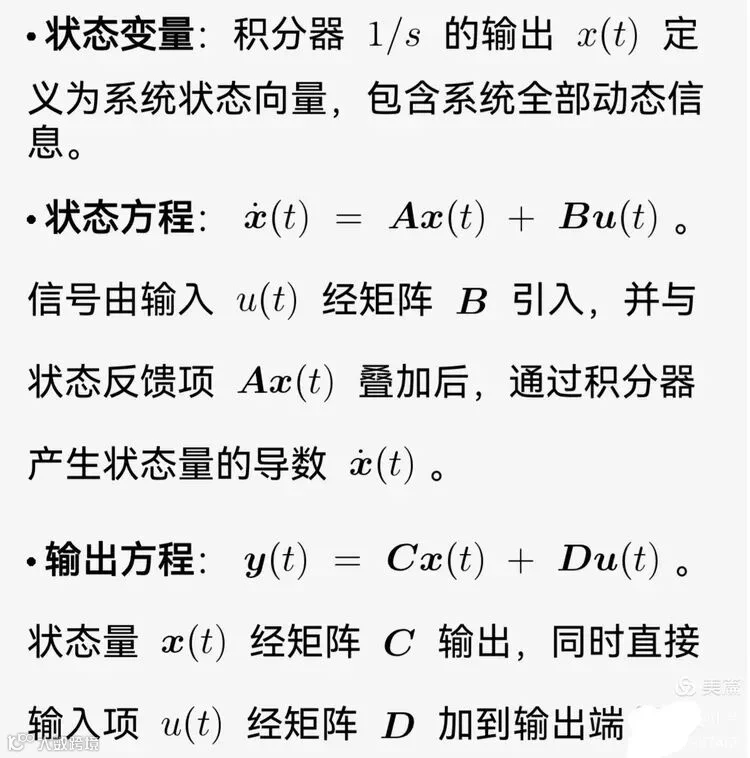
1) 状态方程
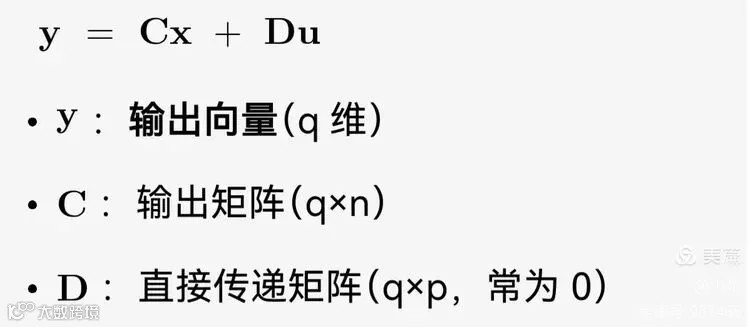
2) 输出方程
3. 状态空间的三大优点
三、传递函数 ↔ 状态空间
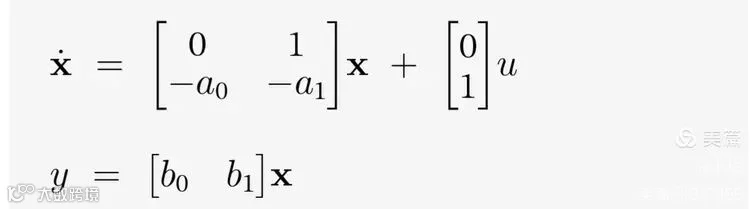
1. 传递函数 → 状态空间
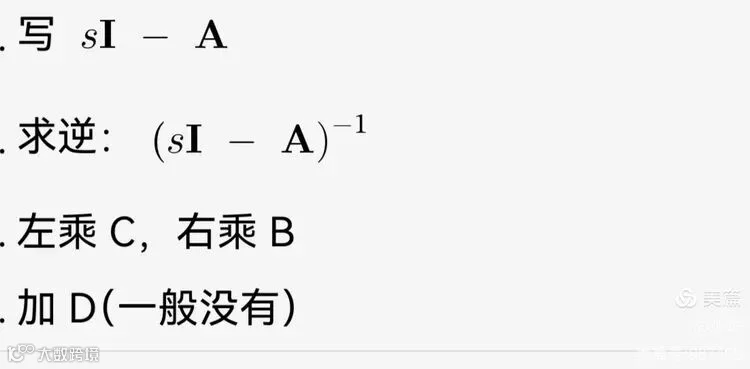
2) 状态空间 → 传递函数
公式
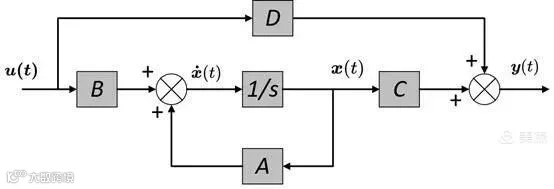
四、线性系统状态空间结构图
如下结构图表示单输入单输出(SISO)线性定常系统的状态空间模型。
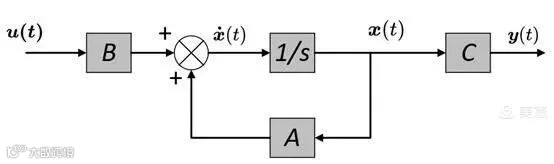
D=0 的结构图(D表示输入直接影响输出,很少见)
状态空间的结构图理解:
积分器:1/s(数量 = 状态个数)反馈:A 矩阵;输入耦合:B 矩阵;输出抽取:C 矩阵。
每个积分器的输出 x(t) 就是一个状态变量,其个数等于系统阶数。
状态更新:状态方程体现了状态自身的演变(A阵)与受输入的驱动作用(B阵)。
测量输出:输出体现了从内部状态到外部输出的映射(C阵)。
五、应用举例
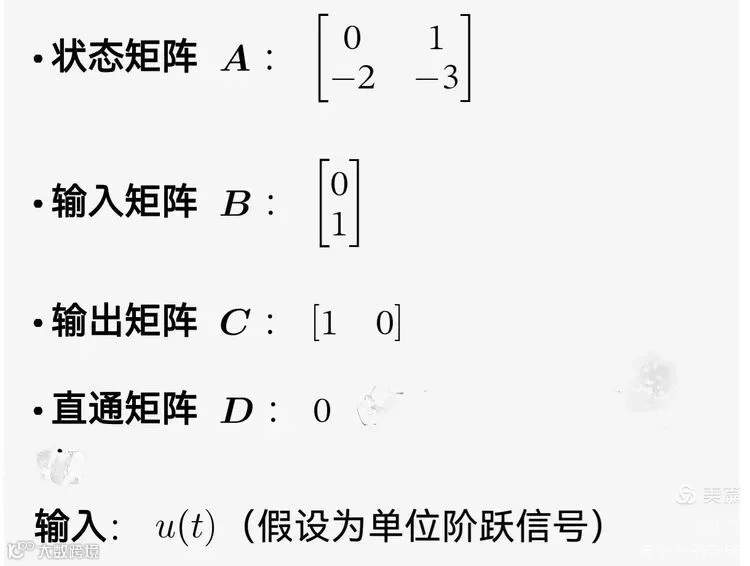
举例1
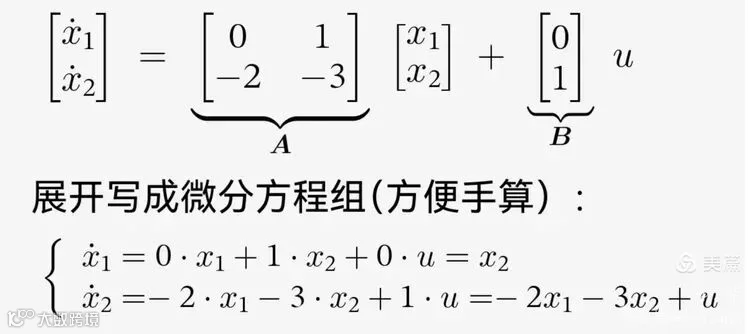
假设系统结构图中的矩阵参数如下(二维系统),求:根据结构图计算输出 y(t)
第一步:写状态方程
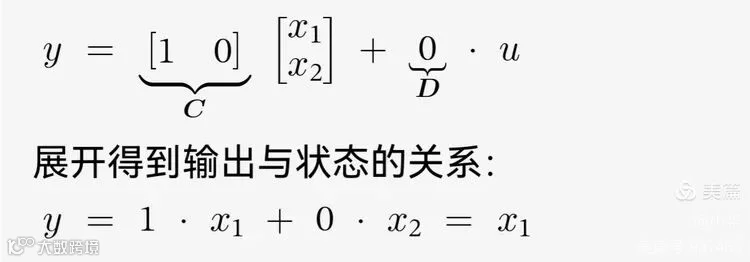
第二步:写输出方程
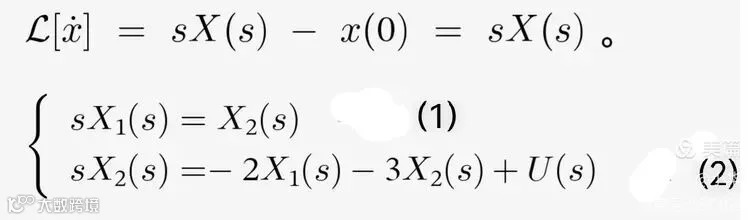
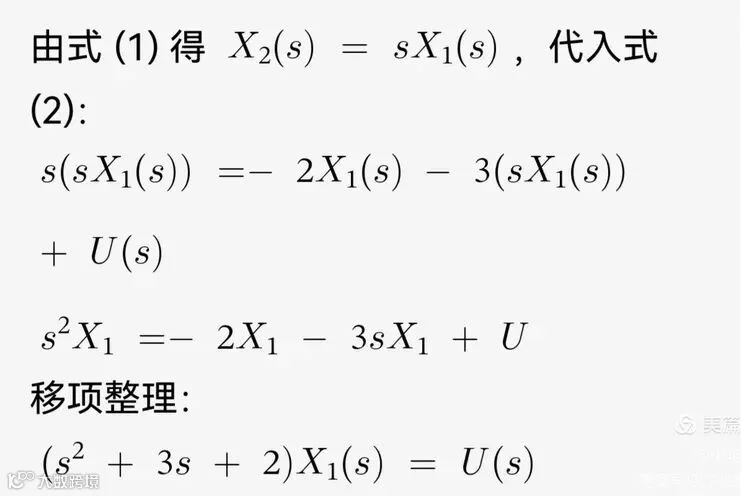
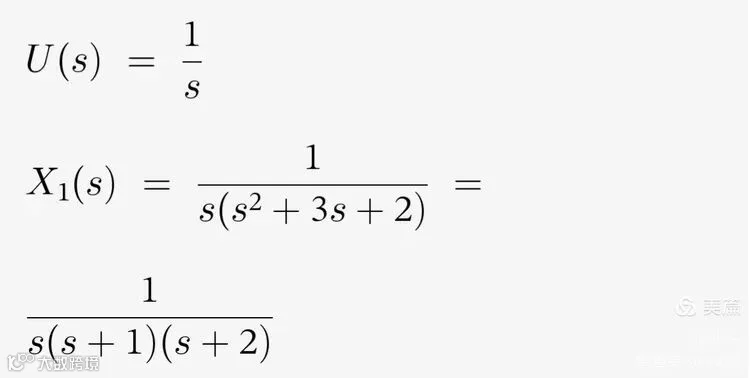
第三步:求解微分方程(拉普拉斯变换法)
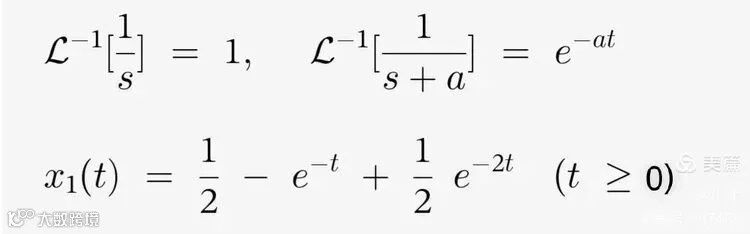
第四步:部分分式展开与反变换
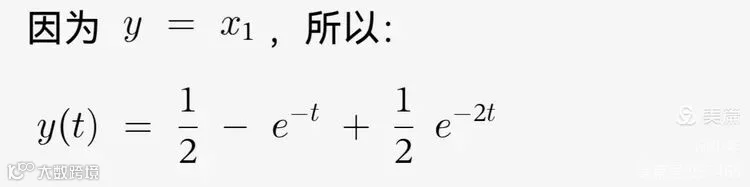
第五步:得出最终结果
举例2
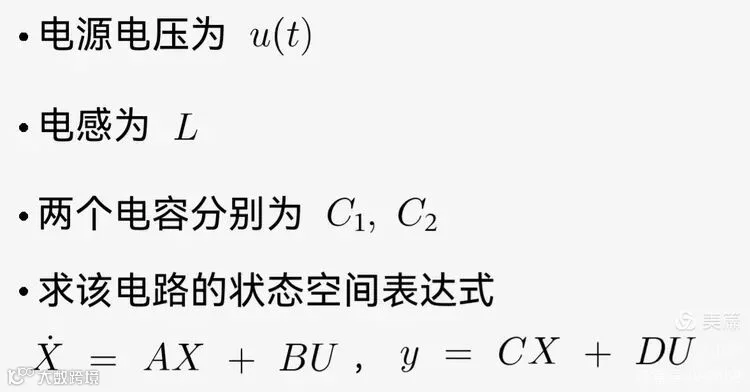
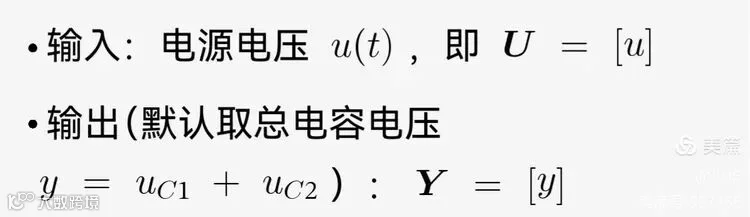
经典的二阶 LC 串联电路,含两个电容串联,电感串联,输入为电压源 u(t),输出通常取电容电压或电感电流。
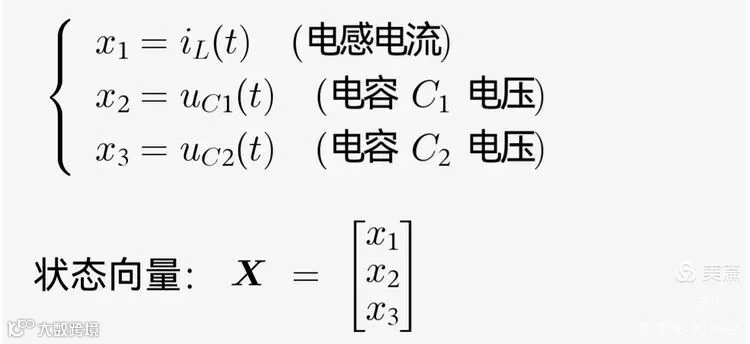
步骤1:确定状态变量
选择电感电流和电容电压作为状态变量(物理意义明确,且为独立储能元件)
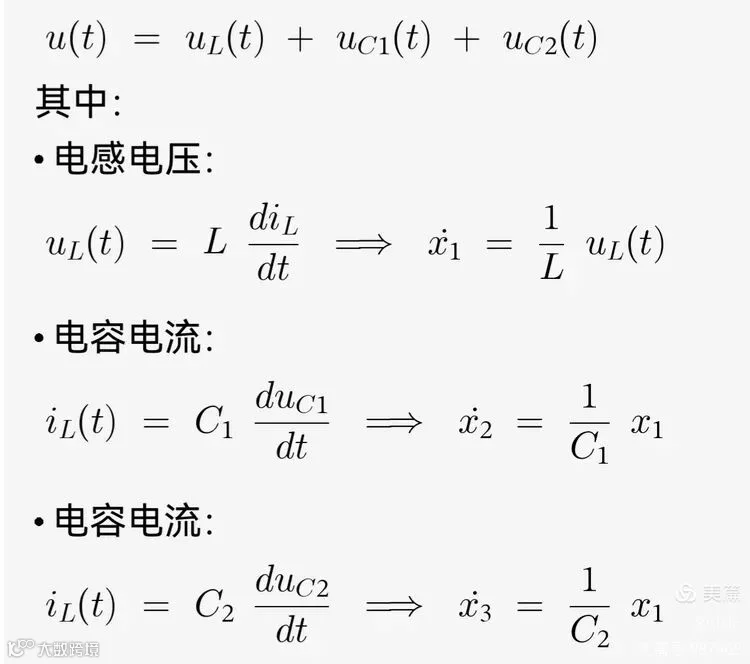
步骤2:列写电路方程(KVL/KCL)
根据基尔霍夫电压定律 (KVL),沿回路列写电压方程:
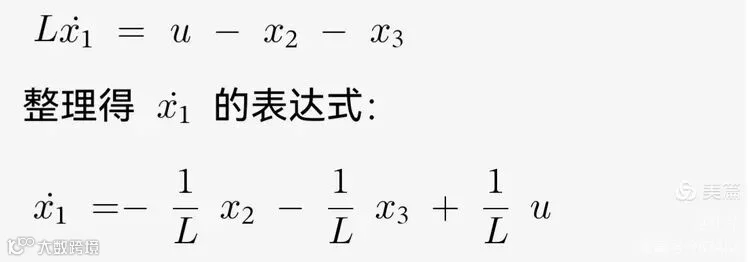
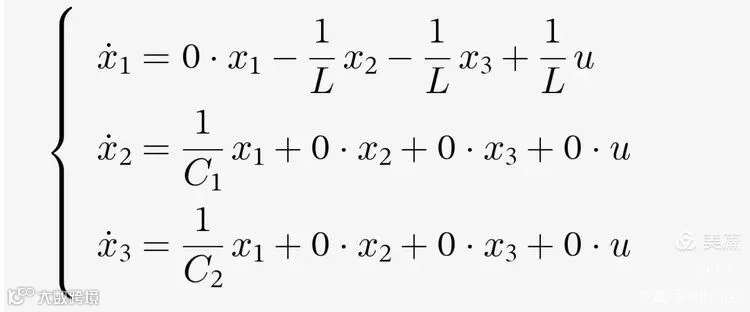
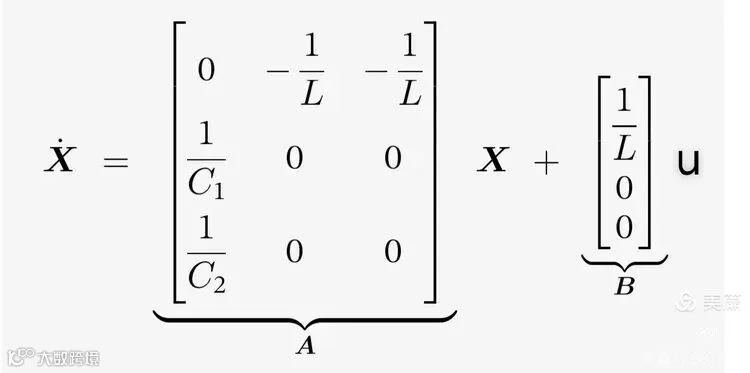
步骤3:推导状态方程
将 KVL 方程代入电感电压表达式,展开为状态变量形式:
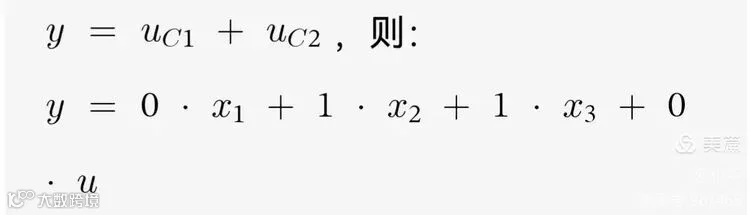
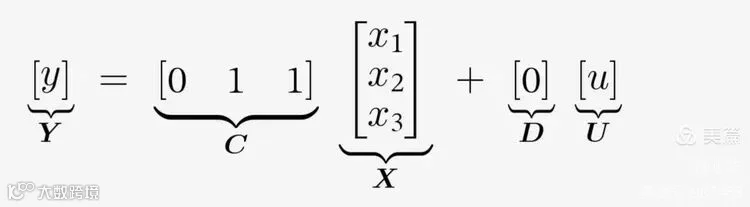
步骤4:推导输出方程
特殊情况说明
若电路拓扑或输出定义不同(例如仅取 C1电压为输出),仅需调整 C 矩阵:
有了状态空间就能判断系统能不能控,能不能观测。才能设计状态反馈器,配置零极点。才能设计观测器,估计系统状态。才能实现LQR 最优控制和卡尔曼滤波。