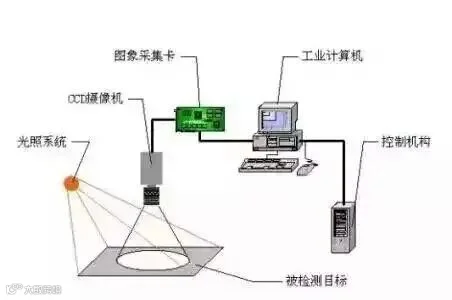
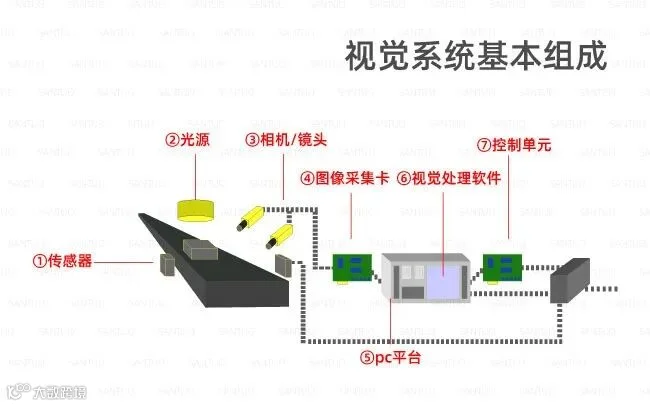
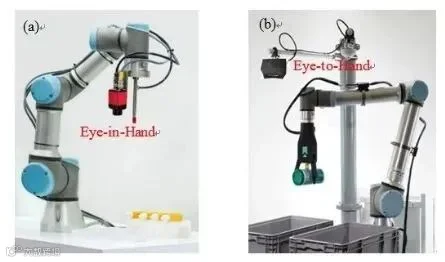
机器人视觉系统的主要功能是模拟人眼视觉成像与人脑智能判断和决策功能,采用图像传感技术获取目标对象的信息,通过对图像信息提取、处理并理解,最终用于机器人系统对目标实施测量、检测、识别与定位等任务,或用于机械人自身的伺服控制。

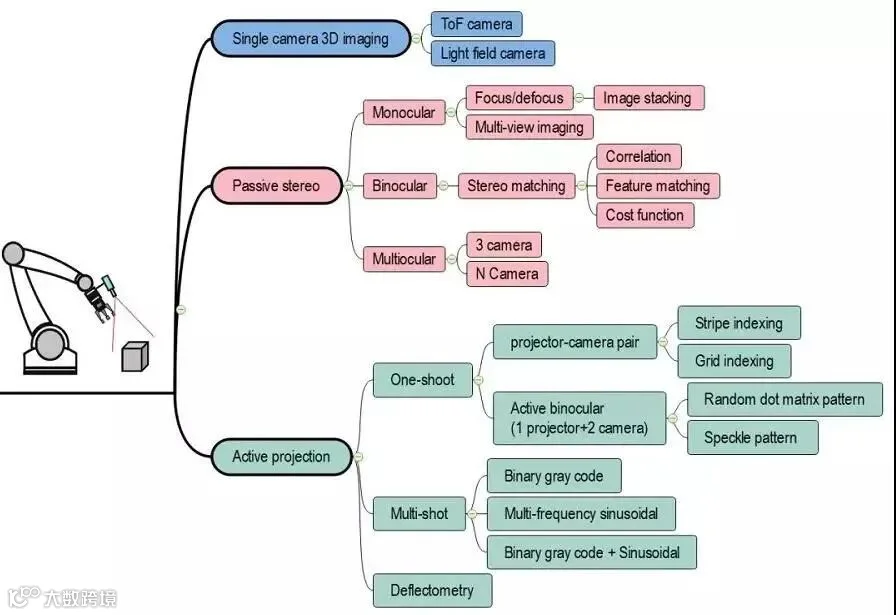
飞行时间3D成像
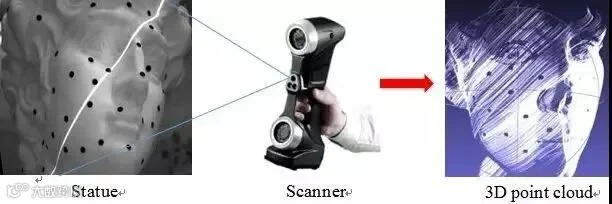
扫描3D成像
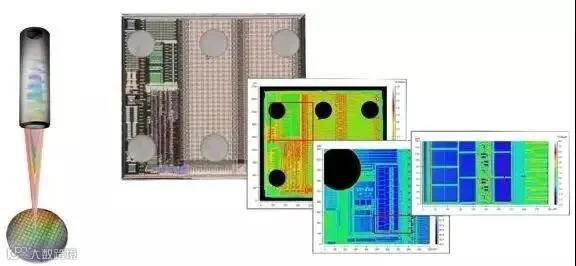
结构光投影3D成像
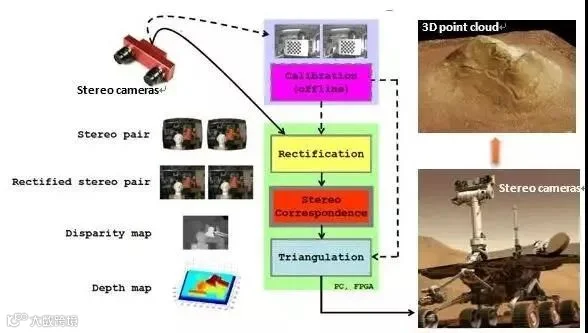
立体视觉3D成像
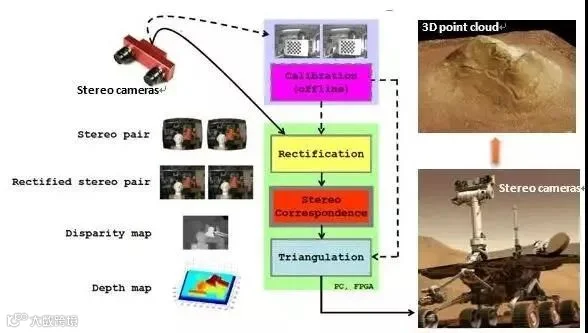
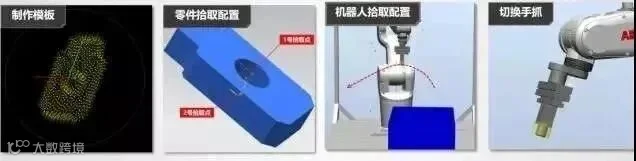
机器视觉3D引导系统框架
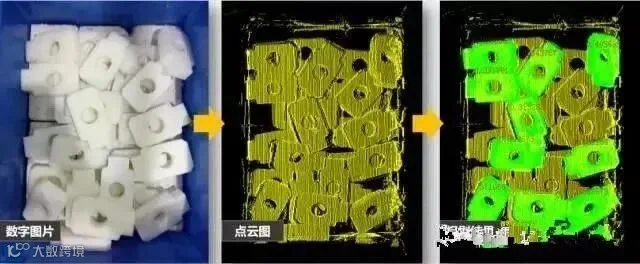
3D重建和识别技术
3D重建和识别效率

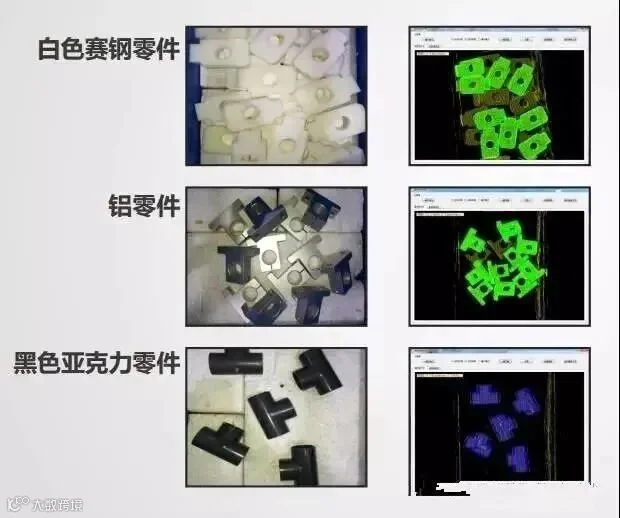
多种材质识别效果测试
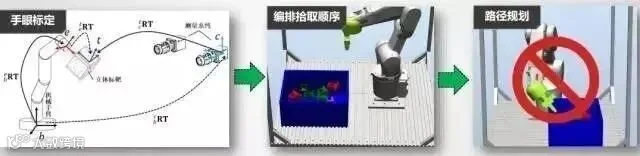
机器人路径规划
快速切换拾取对象