
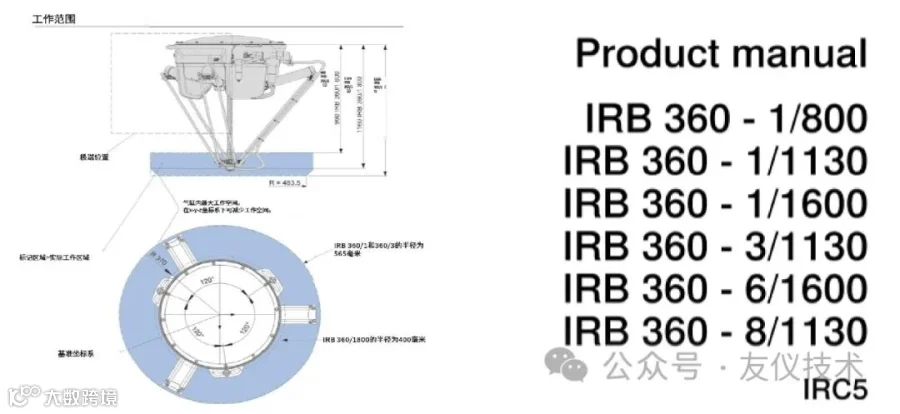
IRB 360机器人适用于精密拾取和定位应用,它的突出特点是增加的速度、高负载、准确性、可靠性和易用性。主要应用于装配、材料处理、采摘、包装领域。
注意:
1、在开展任何维保作业前,请了解安全信息,请专业维保人员进行操作。
2、在IRB360通电的情况下,务必先确保对IRB 360采取保护接地措施,然后才开展任何维护工作。
维护计划
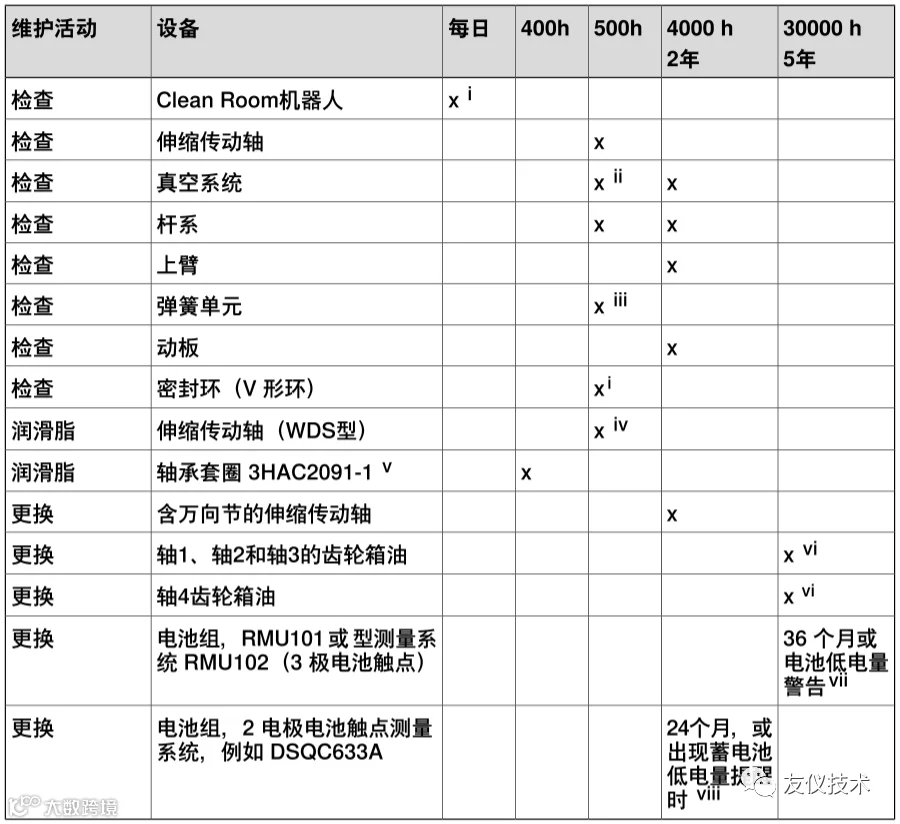
检查活动



 友仪技术
友仪技术
IRB 360机器人适用于精密拾取和定位应用,它的突出特点是增加的速度、高负载、准确性、可靠性和易用性。主要应用于装配、材料处理、采摘、包装领域。
注意:
1、在开展任何维保作业前,请了解安全信息,请专业维保人员进行操作。
2、在IRB360通电的情况下,务必先确保对IRB 360采取保护接地措施,然后才开展任何维护工作。
维护计划
检查活动