发那科机器人零点校准
零点标定是使机器人各轴的轴角度与连接在各轴电机上的脉冲编码器的脉冲计数值对应起来的操作。
但在出现一些特殊情况后,需要对机器人进行标定恢复,例如机器人本体电池电量不足、更换机器人电机/编码器等,其中电池电量不足的情况最为常见,此时机器人会出现SRV-062报警。

SRVO-062报警消除方法:
①电池掉电后,所有6个轴都会出现SRVO-062 BZAL报警。需要先消除该故障,机器人才能点动。
②点击[MENU]-0下页-系统,确认系统子菜单中是否有“零点标定”菜单,
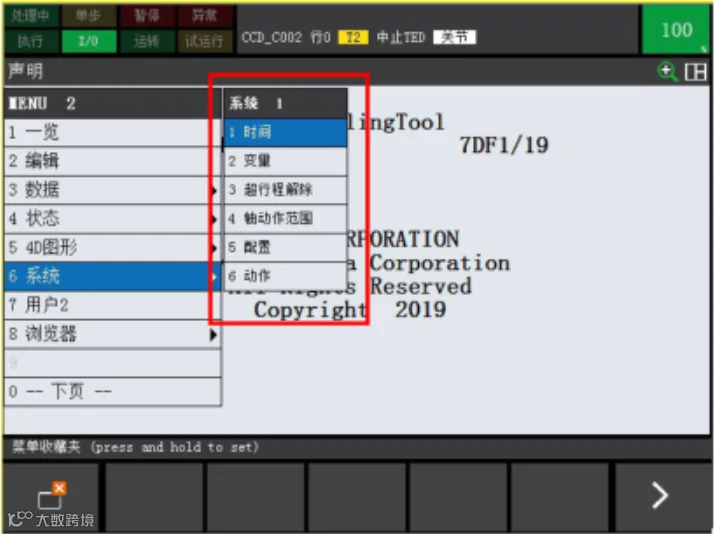
如果有则跳过该步骤:如果没有,[ENTER]进入“2变量”子菜单,找到$MASTER_ENB,将变量值由0改为1,修改完成后再点击F1[类型],就可以看到“零点标定/校准”子菜单。
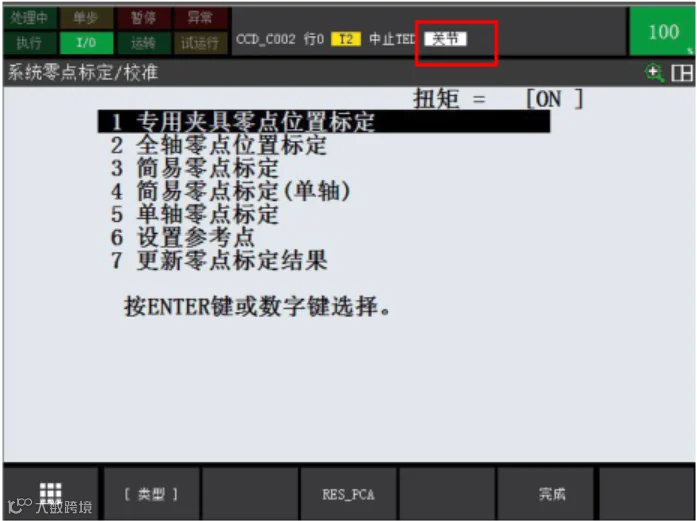
③按[ENTER]进入零点标定界面,点击F3[RES_PCA],会提示 是否解除脉冲编码器报警,点击 F4[是]确认后,控制柜断电重启。重启完成后,SRVO-062报警即已消除。
注:如果点击零点标定界面 F5 [完成],零点标定界面将会被隐藏,需要重复步骤①修改变量才能恢复显示。因此,在完成整个零点标定操作之前,请勿点击F5[完成]。

SRVO-075报警消除方法:
①SRVO-062消除后,会出现SRVO-075报警提示脉冲编码器位置未确定。
②此时机器人可以在关节坐标系下单轴点动。点击【COORD】按键,将坐标系切换到“关节”后,逐个点动6个轴,使每个轴都来回旋转20度左右。
③6个轴都旋转完成后,即可正常消除SRVO-075 报错
零点标定:
针对电池掉电导致的零点丢失,常用的两种零点标定恢复方法是全轴零点标定和单轴零点标定。下面介绍两种方法的区别以及应用场合:
全轴零点标定:
标定后精度取决于标定时刻度线的对齐情况,由于完全靠人眼观察判断,恢复后精度肯定不如出厂精度,适合于普通的搬运等对机器人精度要求不太苛刻的情况。
单轴零点标定:
实际车间现场,有些时候零点标定时很难每个轴都能走到零刻度位置。因此对于机器人某些轴难于走到 0°刻度位置或者某些轴 0°刻度被外物遮挡无法对齐观察时,可考虑单轴零点标定,将会带来许多方便。
①:按下[MENU]键,显示出画面菜单。
②:按下“0 ─ 下页 ─”,选择“6 系统”。
③: 按下 F1[类型],显示出画面切换菜单。
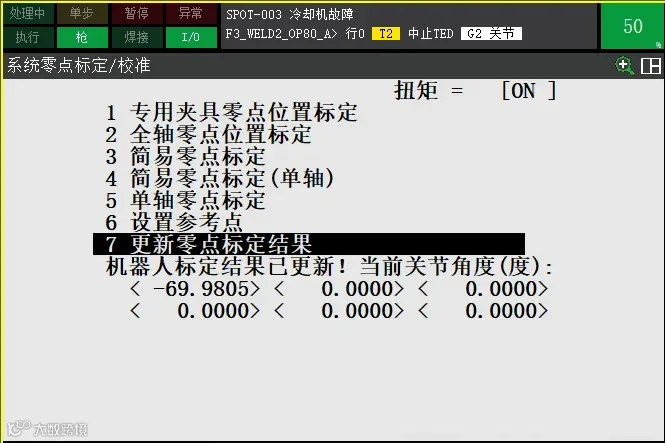
④:选择“零点标定/校准”。出现位置校准画面。
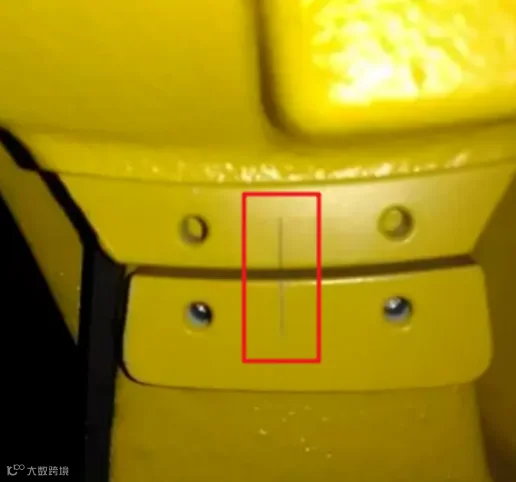
⑤:将机器人各轴单轴运动移动至零位刻度线位置,有的有刻度尺,有的是刻度线。
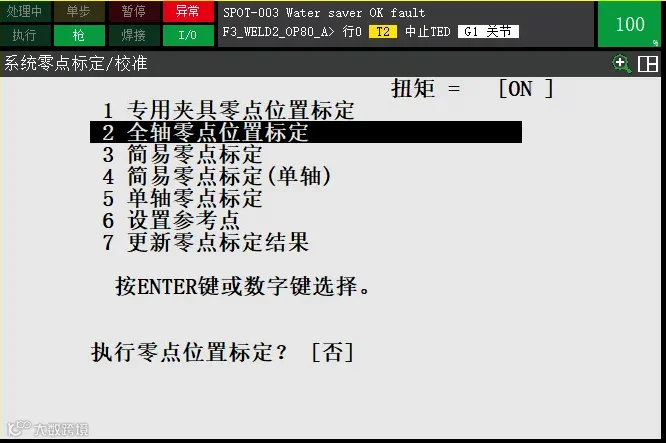
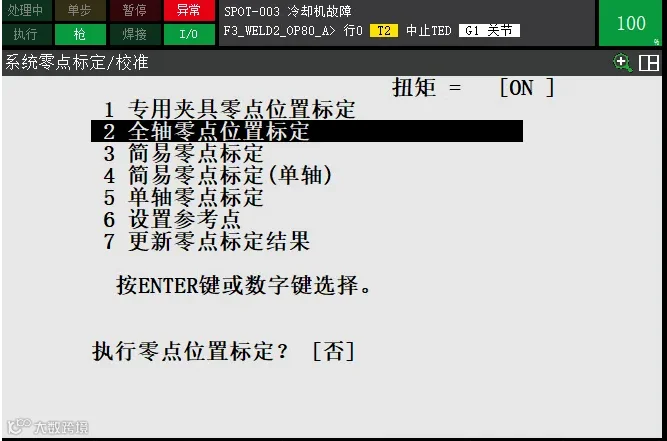
⑥:选择“2 全轴零点位置标定”,按下 F4“是”。设定零点标定数据。
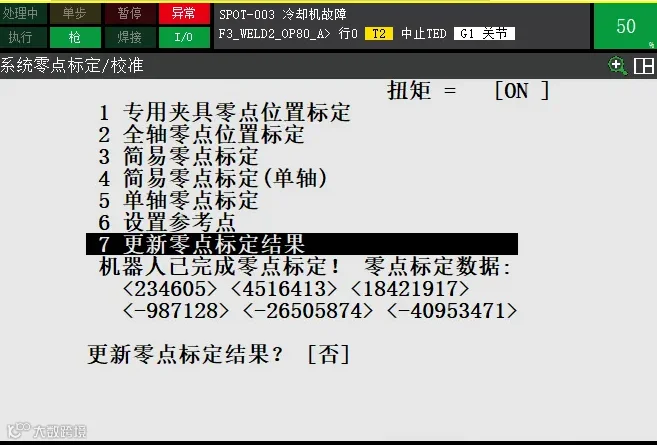
⑦:选择“6 更新零点标定结果”,按下 F4“是”。进行位置校准。

①:按下[MENU](菜单)键,显示出画面菜单。
②:按下「0 --下页--」,选择「6 系统」。
③:按下 F1[类型]键,显示出画面切换菜单。
④:在画面切换菜单上选择“零点标定/校准”。出现位置校准画面。
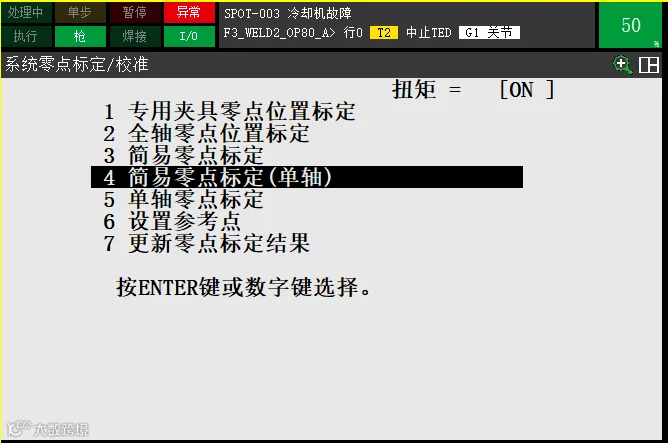
⑤:选择“4 简易零点标定(单轴)”。出现单轴零点标定画面

⑥:对于希望进行单轴零点标定的轴,将[SEL]设定为“1”。可以为每个轴单独指定[SEL],也可以为多个轴同时指定[SEL]。

⑦:输入零点标定位置的轴数据。

⑧:按下 F5“执行”。执行零点标定。由此,[SEL]被重新设定为“0”,[ST]变为“2”(或 1)。
⑨:等单轴零点标定结束后,按下 [PREV](返回)键返回到原先的画面。
⑩:选择“ 更新零点标定结果”,按下 F4“是”。进行位置校准。
⑪: 在位置校准结束后,按下 F5 键“完成”。
确定机器人直线运动:按[COORD]键将坐标系切换到世界坐标系,点动机器人分别沿X/Y/Z三个方向走直线,确认机器人TCP 可以沿定方向直线行走。如果直线点动时机器人TCP轨迹出现曲线,则需要重新检查/标定零点。
确定原有程序轨迹:如果机器人原先有已经在使用的程序,请在低倍速下手动执行原有程序,确认点位及轨迹。如果是全轴零点定恢复的零点,通常点位会与原先有些许偏差,请确认是否需要重新示教修正。在低倍速确认没问题后方可切换
高速运行。