1. 零点极点基本概念
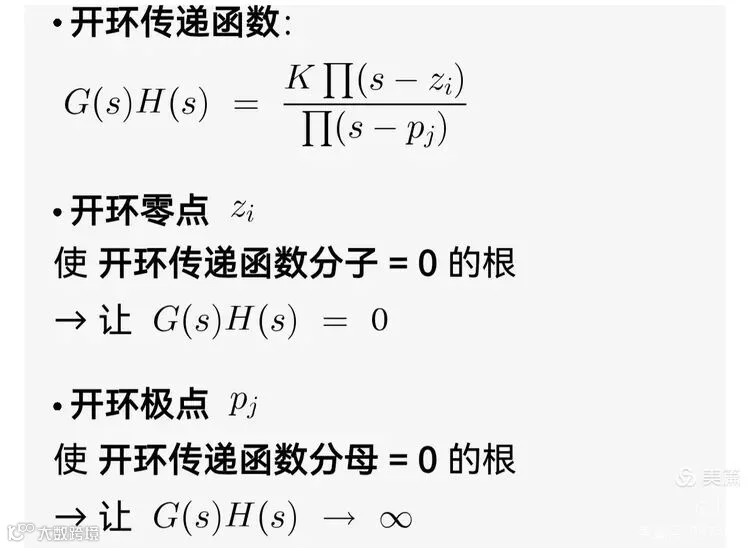
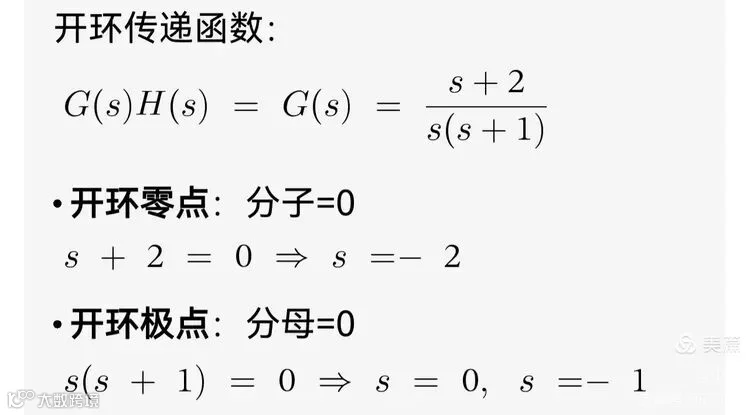
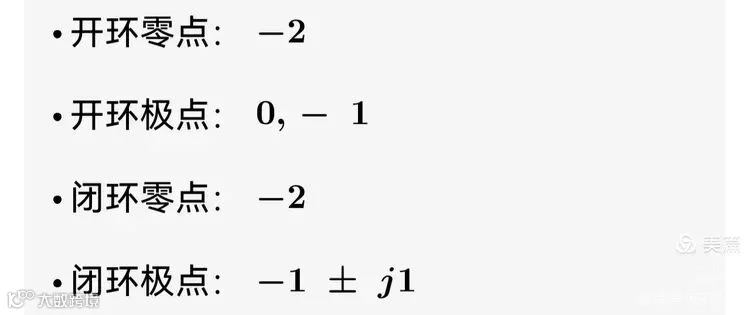
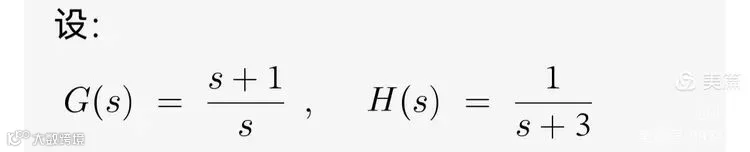
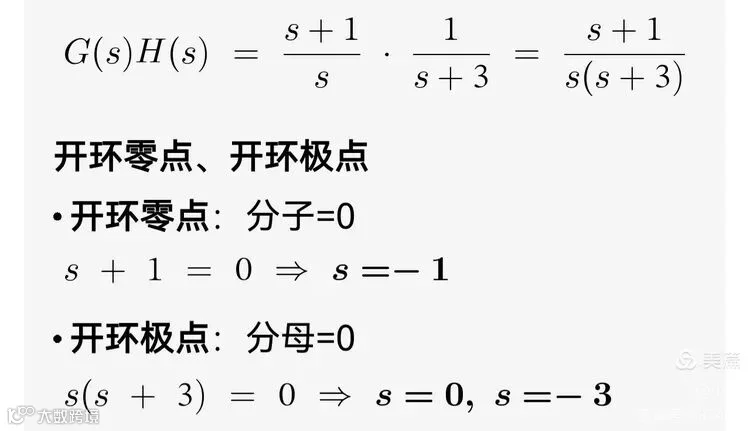
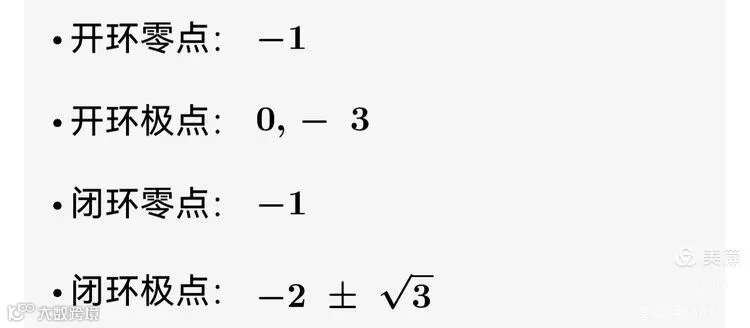
开环零点、开环极点
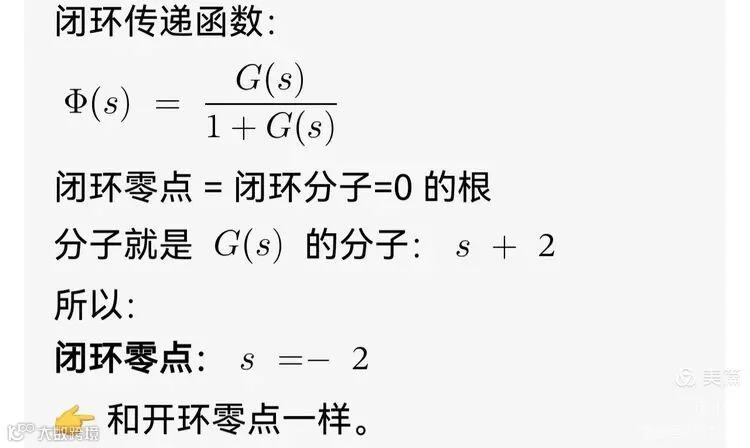
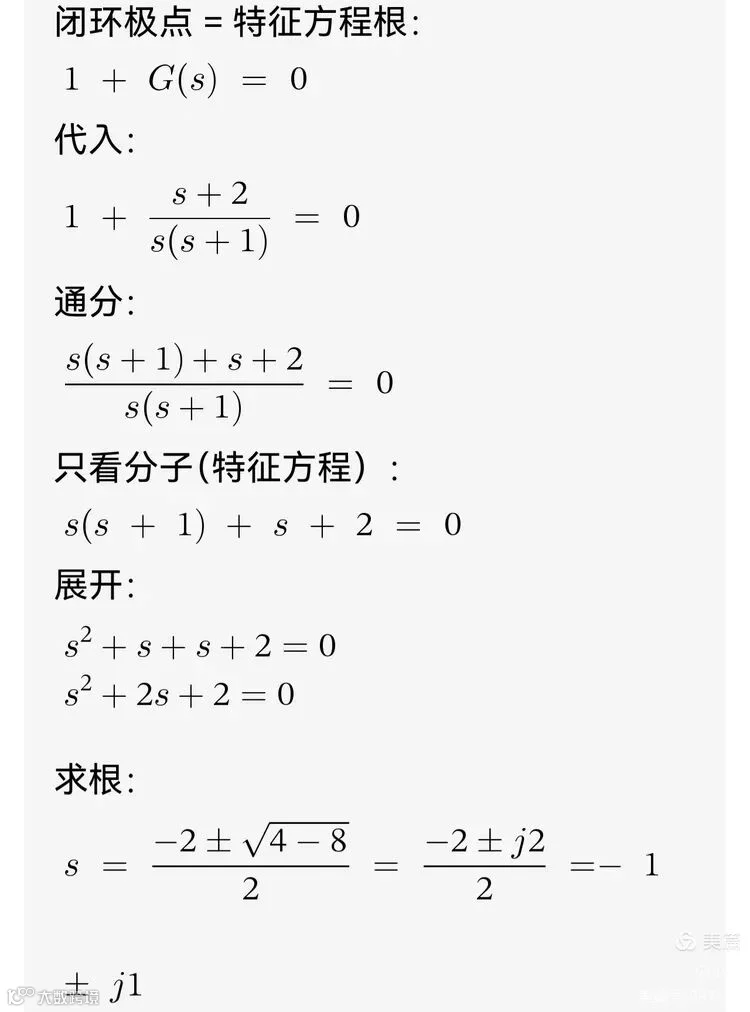
闭环零点、闭环极点

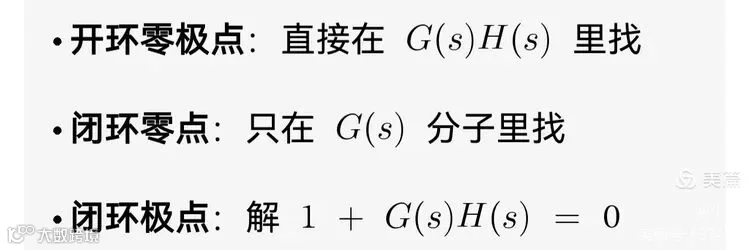
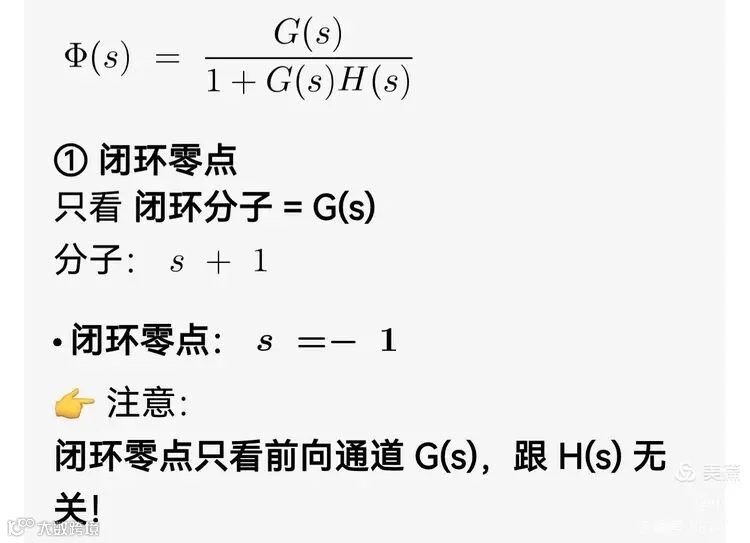
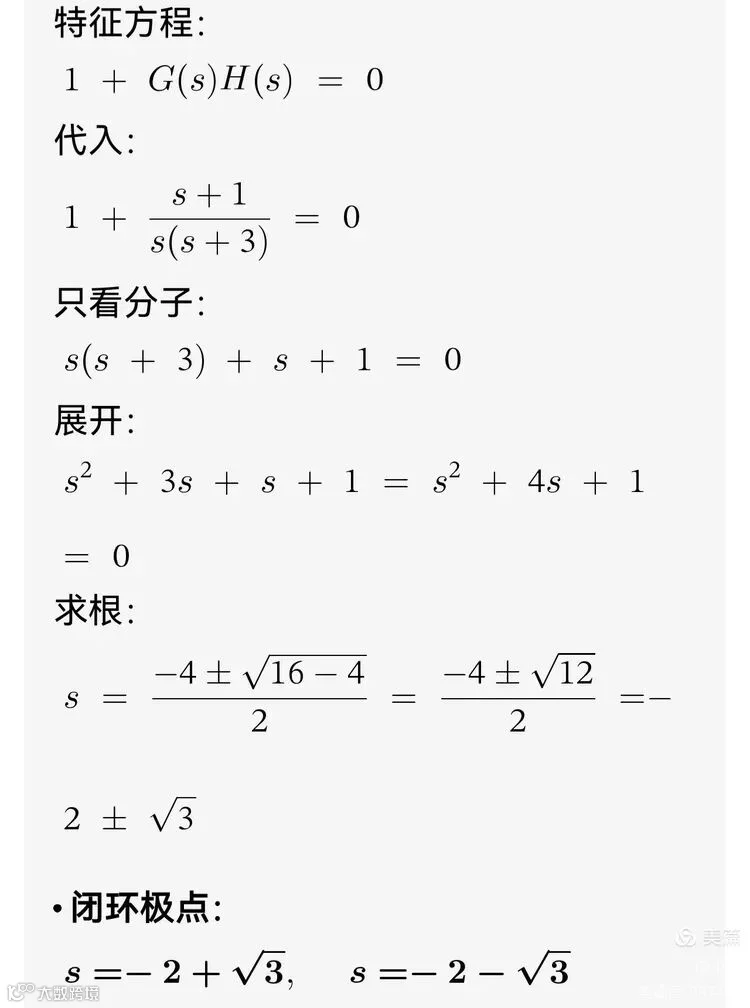
2) 求闭环零点

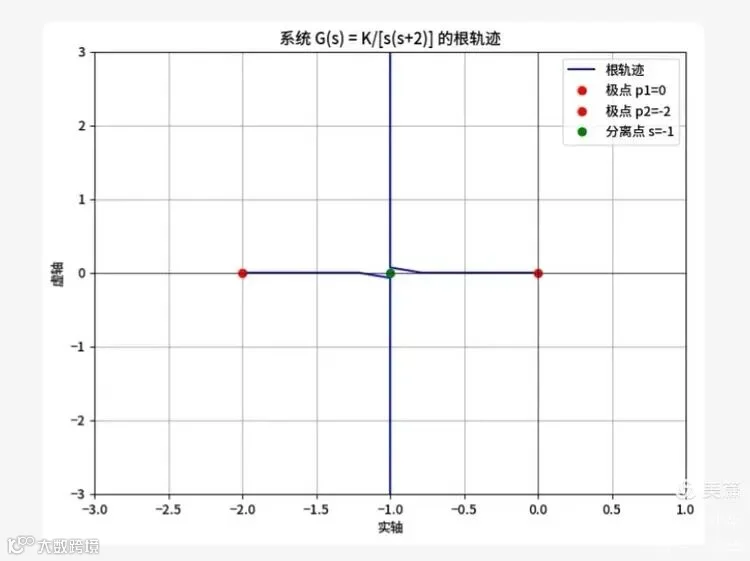
2. 根轨迹定义
3. 根轨迹方程
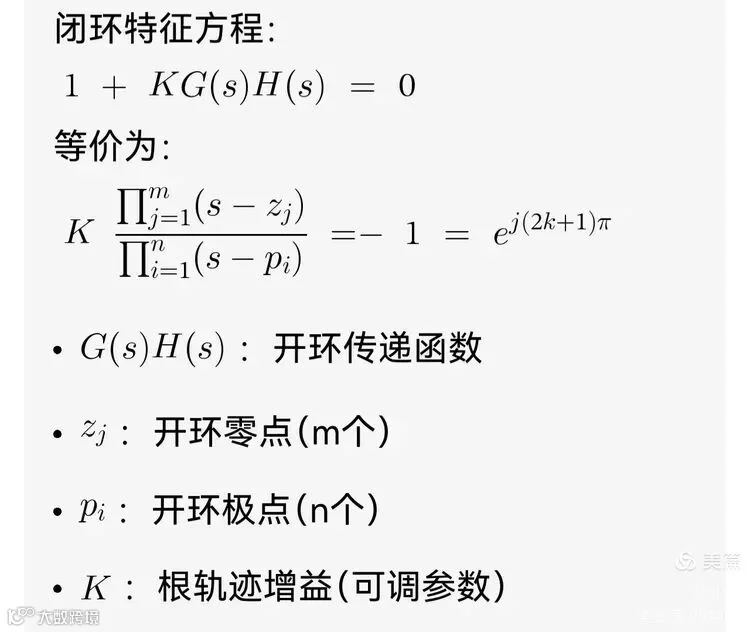
4. 两大判据(绘图基础)
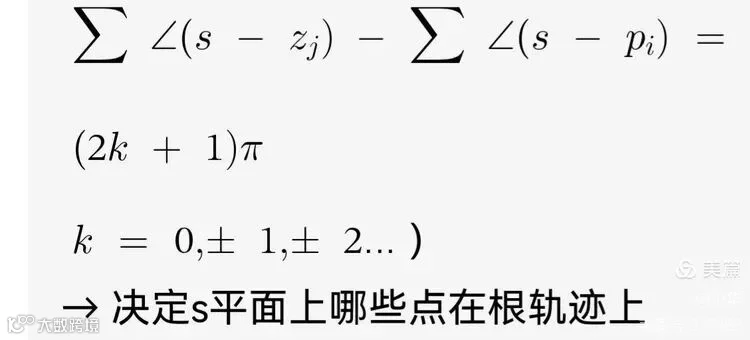
相位条件(充要)
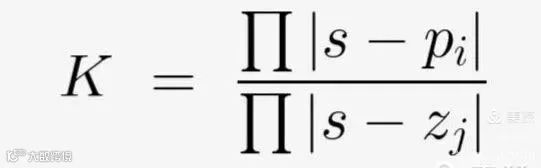
幅值条件(必要)
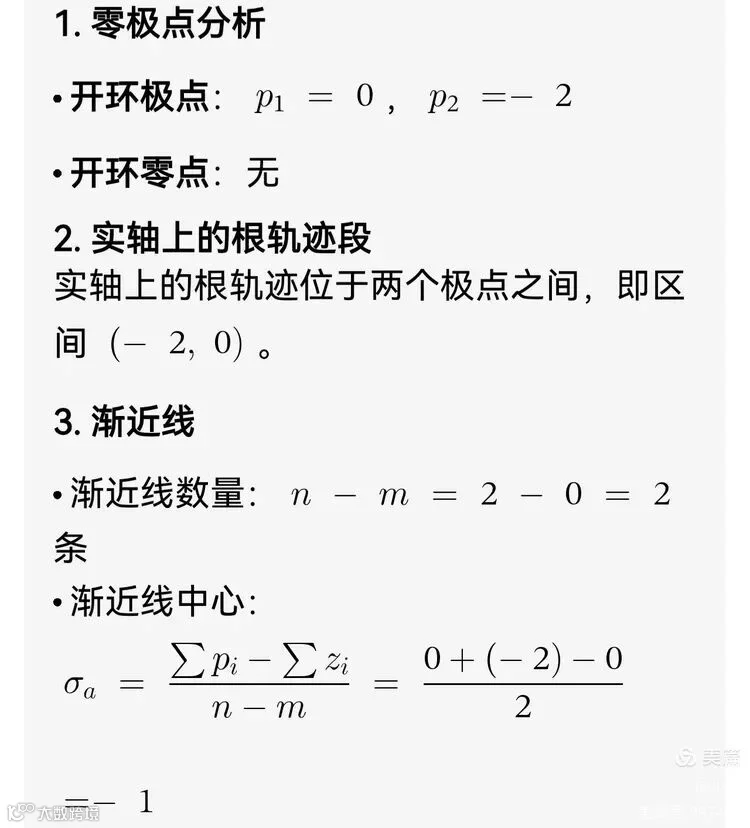
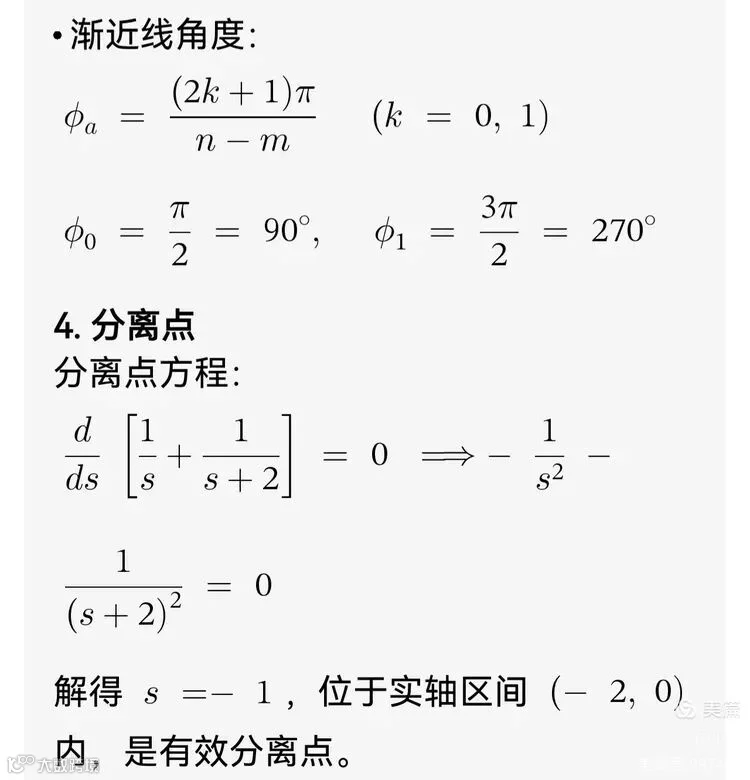
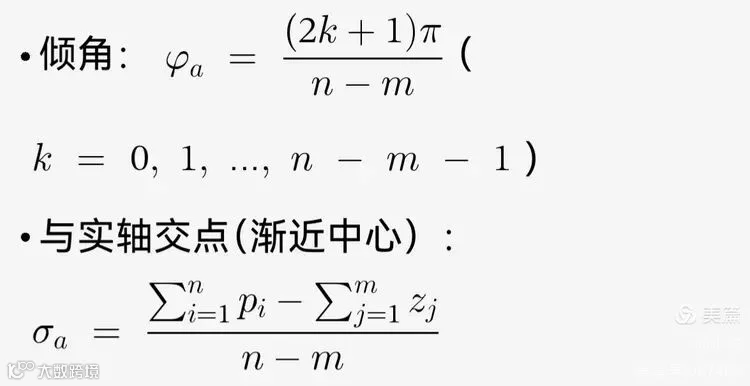
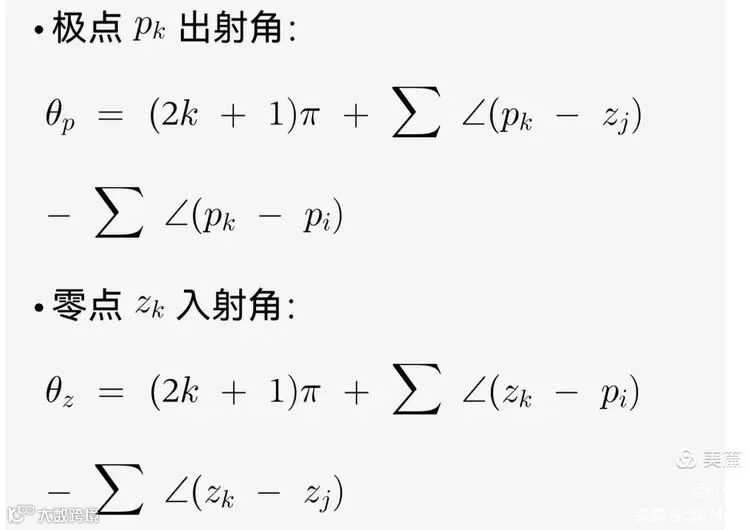
5. 根轨迹的基本性质(绘制法则)

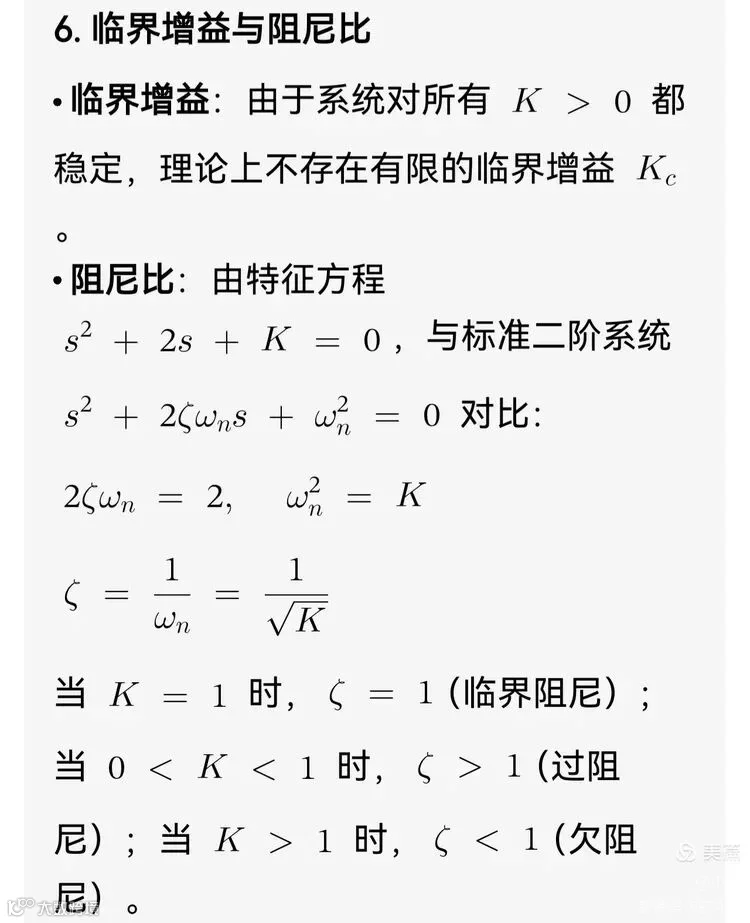
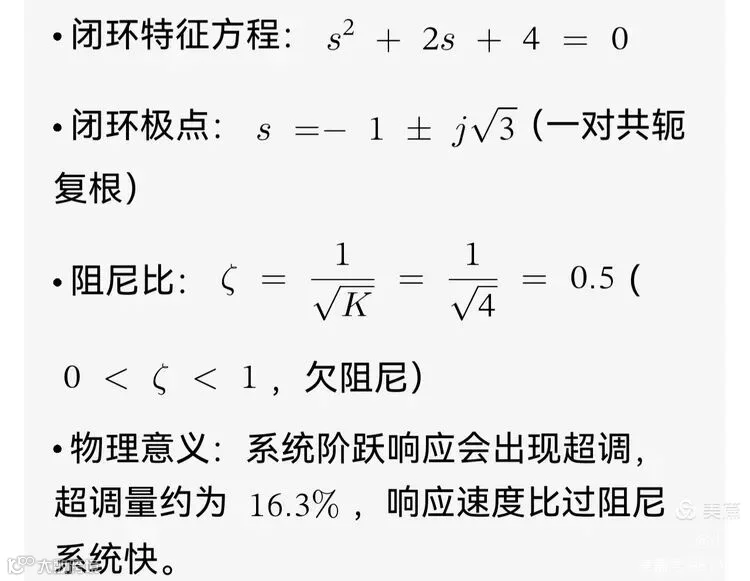
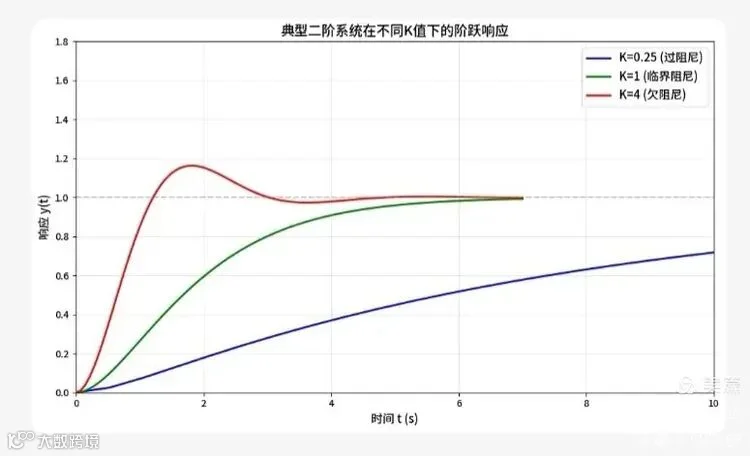
6. 根轨迹与系统性能
-
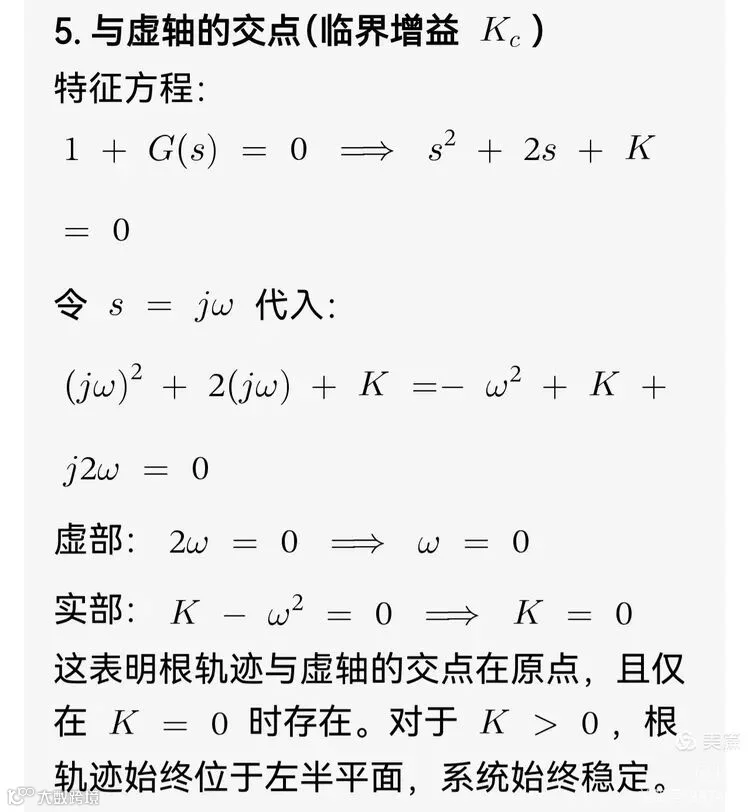
全轨迹在左半s平面: 系统稳定 。 -
轨迹穿过虚轴进入右半平面: 临界稳定/ 不稳定。 -
临界增益 Kcr: 系统由稳变不稳的K值。
-
极点离虚轴越远:响应越快(调节时间短) 。 -
极点阻尼角β: ζ= cosβ, ζ≈ 0.707 时超调小、响应快 。 -
极点虚部越大: 振荡越剧烈。
7. 绘制步骤