
清华研发超薄触觉传感器SuperTac 材料成本不足1美元

SuperTac使机器人实现无视觉触觉感知:精准识别熟果及遥控器,区分杯子材质与表面粗糙度,检测0.07毫米发丝,盲文识别准确率100%。
由清华大学深圳国际研究生院丁文伯教授团队研发,材料成本低于1美元,具备量产潜力。
(来源:https://doi.org/10.1038/s44460-025-00006-y)
应用场景多元化
SuperTac适用于精细化触觉感知全场景。已获国内头部企业及人形机器人厂商合作意向,聚焦居家康养柔性交互;科技部青年科学家项目提议拓展至航空航天、核辐射等高危领域;军工应用需求显著。
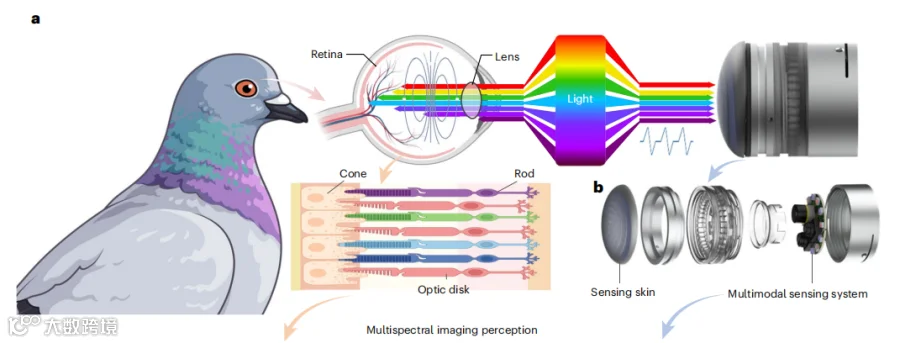
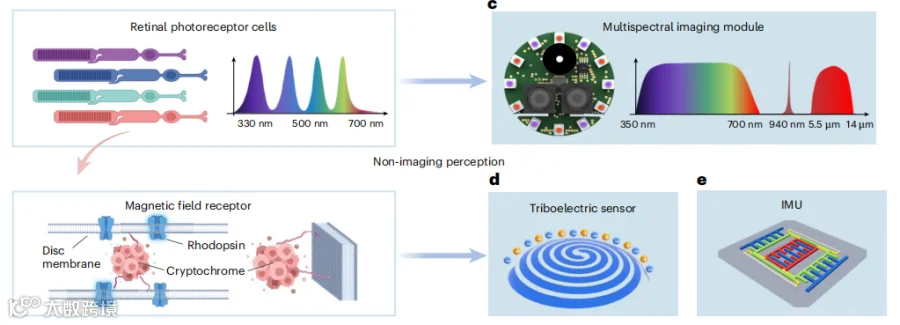
仿生设计突破局限
团队受鸽子紫外视觉及磁感应能力启发,集成多光谱成像、摩擦电传感等技术。SuperTac仅1毫米厚,实现材质、纹理、温度、颜色全方位感知,支持接触前预判物体靠近。
(来源:https://doi.org/10.1038/s44460-025-00006-y)
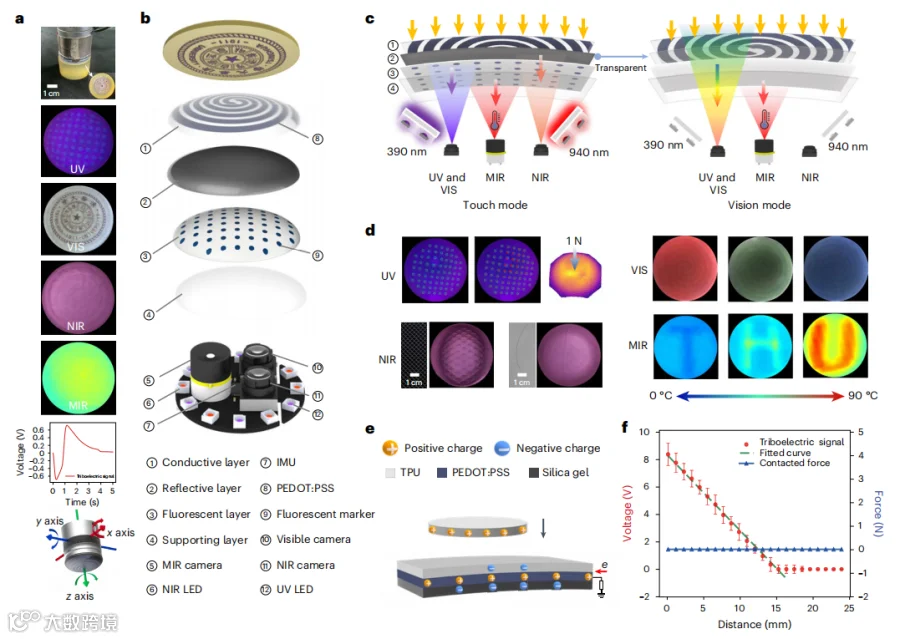
四层结构精妙解析
传感器采用四层设计:导电层(PEDOT:PSS材料)通过摩擦电分辨材质;反射层实现单向光学切换;荧光层在紫外光下标记变形位移;硅胶支撑层通过气压调节受力范围。指甲盖大小区域同步感知力、温度、纹理等十种信息。
(来源:https://doi.org/10.1038/s44460-025-00006-y)
性能指标全面领先
测试数据表明:力觉精度0.06牛、位置精度0.4毫米;温度范围0-90°C、精度0.25度;纹理识别98%、材质分类95%、滑动检测97%;非接触感知距离达15厘米。
(来源:https://doi.org/10.1038/s44460-025-00006-y)
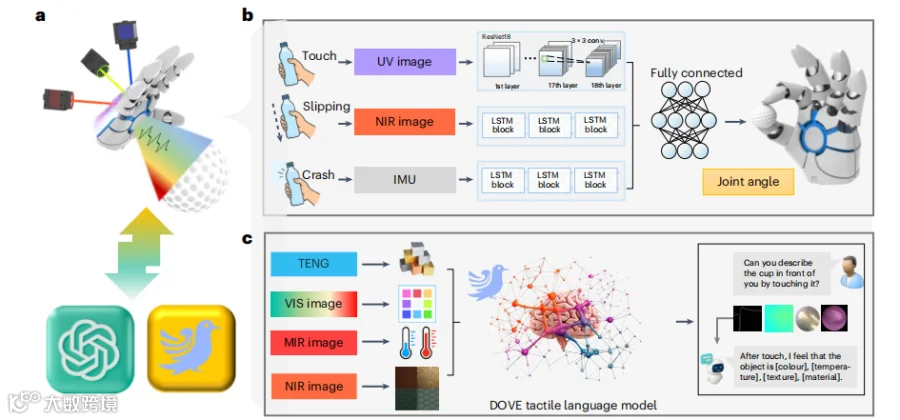
触觉语言模型赋能
配套85亿参数DOVE模型将多模态触觉数据转为自然语言,如输出“黄色、室温、凸起纹理、金属质感”。具备推理能力,可识别相似物体的材质差异,在垃圾分类等场景实现精准判断。

图 | 丁文伯(来源:受访者)
工业制造中可检测零件瑕疵或抓取电子元器件;医疗领域辅助识别组织硬度与温度变化;家庭服务中能为盲人提供触觉反馈阅读。
产业化进程加速
经8万次接触测试,信号输出稳定且紫外荧光无褪色。团队正推进小型化研发,目标覆盖机器人全手指。丁文伯团队聚焦与头部企业合作,孵化无界智航公司专项攻克具身智能数据需求。