
HS系列高精度三维激光扫描仪是武汉海达数云技术有限公司完全自主研发的脉冲式、全波形、高精度、高频率三维激光扫描仪,配套武汉海达数云技术有限公司自主研发的全业务流程三维激光点云处理系列软件,具备测量精度高、点云处理效率高、成果应用多样化等特点,广泛应用于数字文化遗产、数字城市、地形测绘、形变监测、数字工厂、隧道工程、建筑BIM等领域。

HS系列高精度三维激光扫描仪
(一)坐标系选择
坐标系采用WGS84,高斯克吕格投影3度带投影,中央经线117度,东偏500000m。
(二)扫描站布设要求
1.扫描站应设置在视野开阔、地面稳定的安全区域;
2.扫描范围应覆盖整个测区,布设均匀减少架站数目;
3.目标物结构复杂、通视困难或有拐角的情况下应适当增加测站。
(三)RTK架设
RTK基准站架设在已知点上,使用RTK移动站测量扫描仪测站坐标、定向靶标坐标,以及精度验证点坐标。
(四)标靶布设
后视标靶应在距离扫描仪50-75米范围内均匀正对扫描仪布设,每站单独定位定向,后续整体平差。
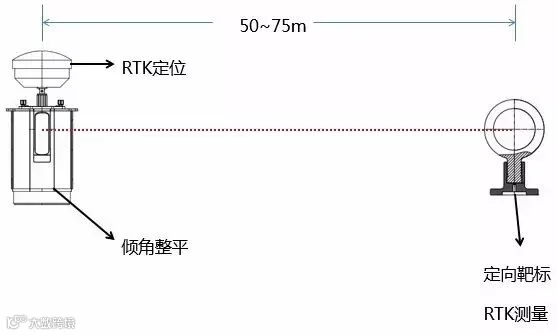
后视定位定向原理图
(五)标靶测量
在需要测量标靶三维坐标时,应将扫描标靶正对扫描仪,待扫描仪精扫标靶完成后,取下反射标靶的反射片保持底部基座位置不变,将RTK移动站放置对应连接头平滑采集点坐标;
(六)点云数据采集
1.作业前应将三脚架大致整正,误差5度以内。可观测扫描仪倾角数据得到当前置平情况。在观测环境中,需固定三脚架上的扫描仪防止摔倒;
2.扫描作业时,按要求设置扫描站点和对应分辨率,相邻测站间有效点云重叠度不低于30%,困难区域不低于15%;
(七)特征点坐标采集
结合现场踏勘,需要采集大营盘特征点坐标(其中采集房屋角点作为平面验证点,采集水平路面作为高程验证点),要求特征点要固定,至少有两个面来拟合确定一个点,特征点周围不能有车辆、树木等,以防被严重遮挡,无法采集到有效数据;要求标靶清晰,无严重磨损,无颜色反差,便于识别。
(一)架站
外业设备架设10min,数据采集13min(包括数据采集和精扫后视标靶),加上设备运输搬运7min,平均每30min/站数据。采集面积为883450平方米约0.88平方千米。

扫描仪架设
内业数据处理:现阶段数据处理工作主要为拼接工作,从导出数据、标靶识别到已知控制点转换坐标,一键定向,自动平差,需要2min/站处理数据。
(二)扫描

扫描参数设置
(三)精扫标靶


精扫标靶设置
(四)定位定向点测量

定位定向点坐标采集
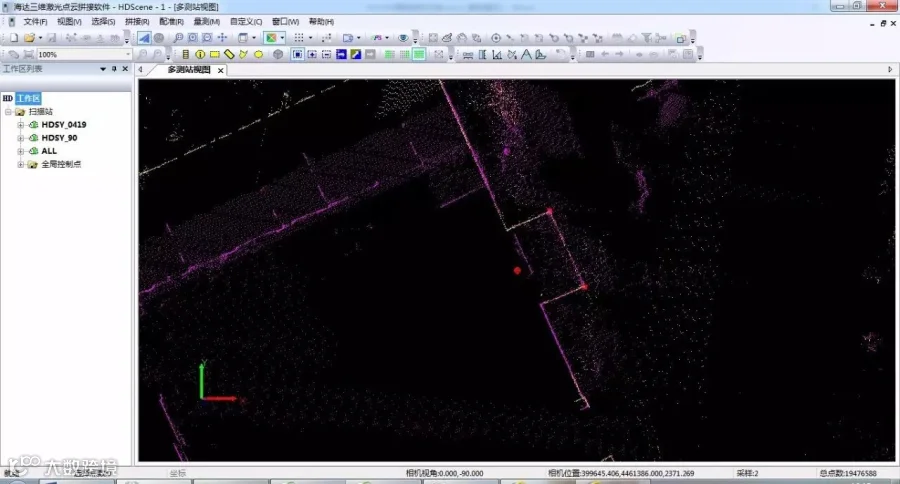
(一)坐标提取
在海达三维激光点云处理软件(HD SCENE)中,提取相应特征点的坐标,将RTK坐标和点云坐标录入Excel,对比分析xyz方向差值及三维距离,并分析均方差。
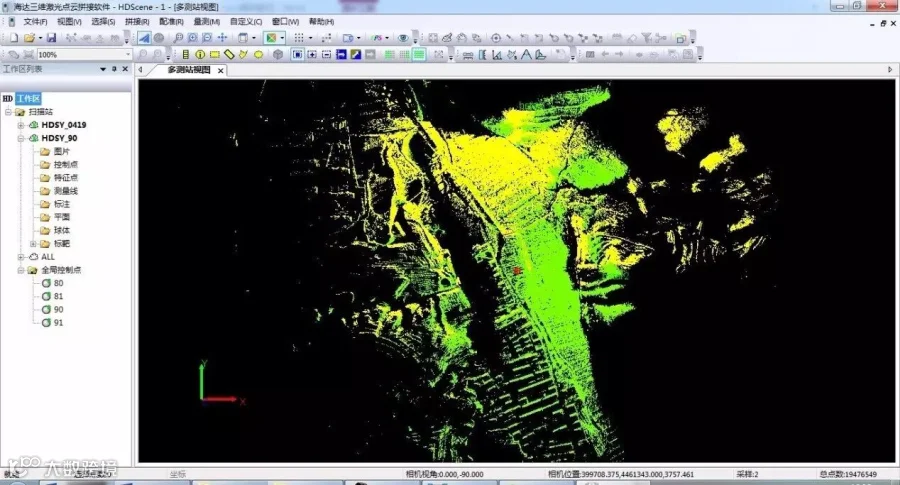
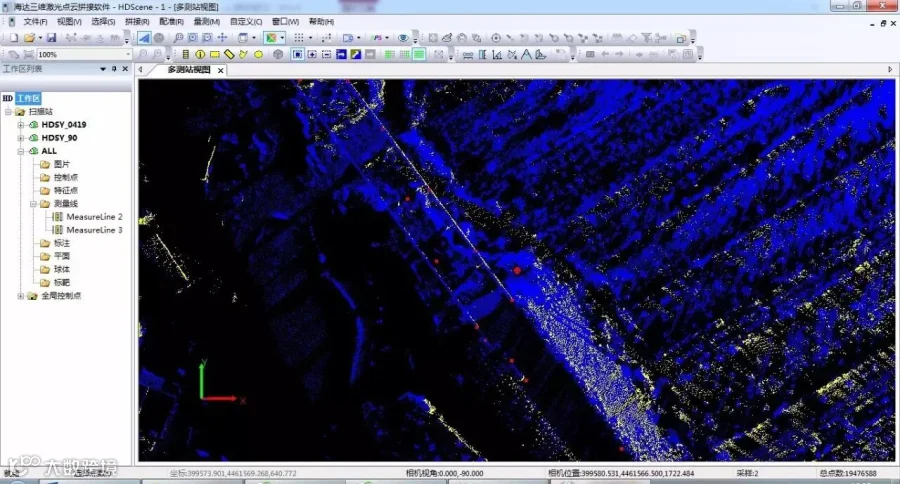
两站点云叠加
通过不同的颜色显示将两站点云数据清晰的呈现出来(有的房屋角点可能因为距离太远或扫描夹角太大而没有多少点,因此拟合房屋轮廓线来做角点更为精准),在不同距离上比较某一栋房屋的房屋角点与RTK实际测量的数值,进而统计出精度报表。
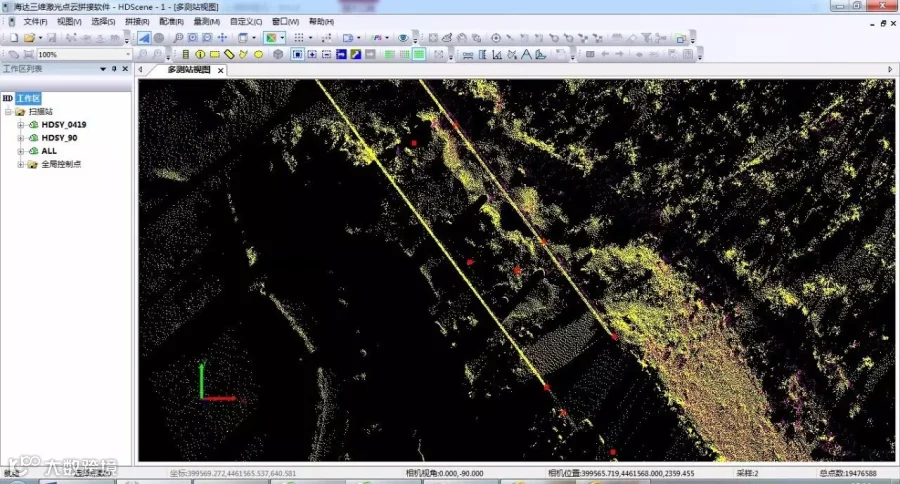
RTK点坐标导入(红色色为RTK点坐标)
RTK点坐标导入(红色方块点为RTK点坐标)
由上图可以看出两站点云数据在房屋拐点处有明显的角点,我们将转换过坐标的房屋拐点点云坐标量测出来与RTK坐标比对、统计。
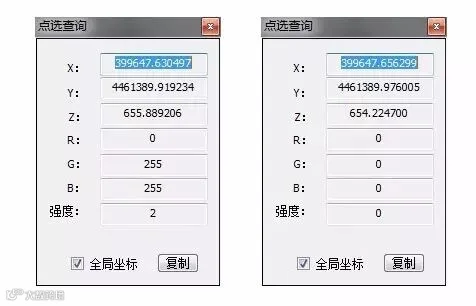
坐标点选取
左图为转换坐标后点云中的坐标点,右图为RTK测量的坐标点,在HD SCENE中选查询功能,可以查询出这两类点的坐标。
两站点云效果图
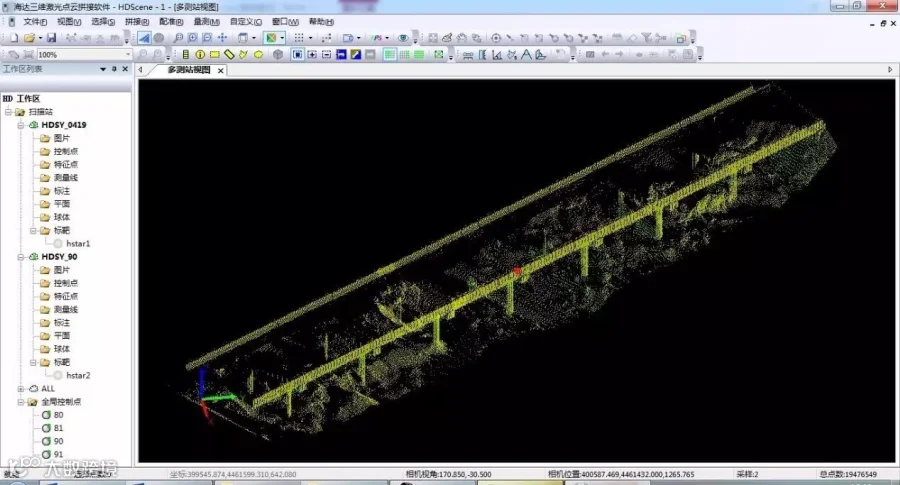
由于大营盘多为山区地形,没有太多立面的房屋,不能很好的拟合交线与RTK测量的房屋角点进行对比,所以进行了多测站点云精度验证。
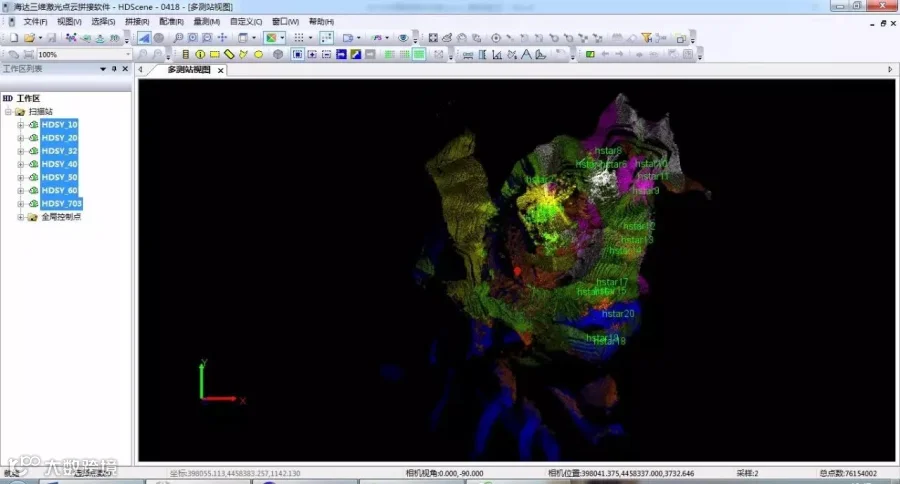
多测站点云效果图
(二)精度对比
点云精度分析使用RTK对测区特征点进行采集,与点云数据中相应的特征点坐标进行对比计算,得出平均值与中误差。
选取特征点
点云叠加对比
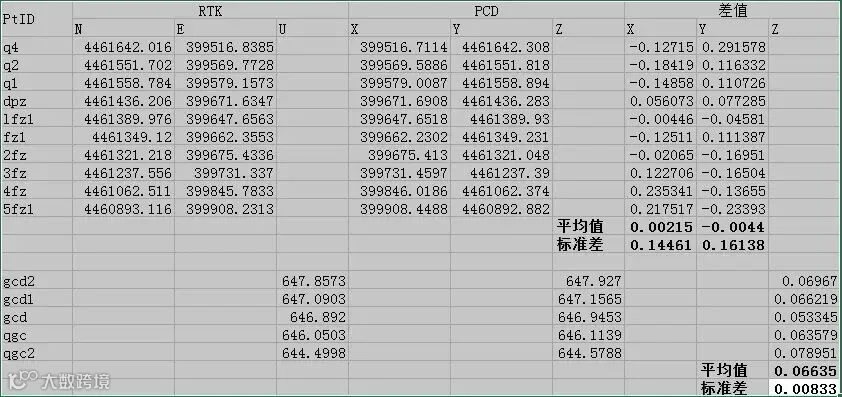
精度验证表
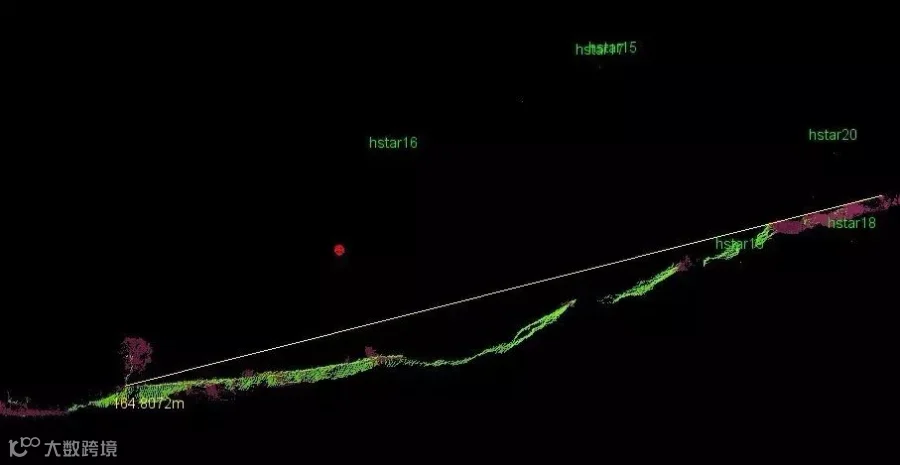
选取多组点坐标进行平面精度验证,在桥面(距离扫描仪200m)和路面(距离扫描仪400-500m)选取多组点进行高程精度验证,最终统计出的精度验证结果。
桥面两站点云图
经过测量,桥面的宽度在点云中的距离与RTK中量测的距离相差为1cm,完全满足精度要求。