本文将国内灵巧手研发制造企业按核心属性划分为三类——多维专精型、本体驱动型、部件延伸型,并针对每类企业的典型特征展开逐一解析。其中,多维专精型亦称垂直新势力/灵巧手专业厂商,聚焦灵巧手垂直领域,专注驱动、传动、感知全栈技术研发与产品化;本体驱动型以人形机器人整机研发为核心,同步自研适配本体的灵巧手,强调“整机-末端”协同优化;部件延伸型则依托电机、丝杠、减速器、传感器等核心零部件技术积累,向灵巧手领域延伸布局,通过部件复用构建成本与量产优势。
01
多维专精型
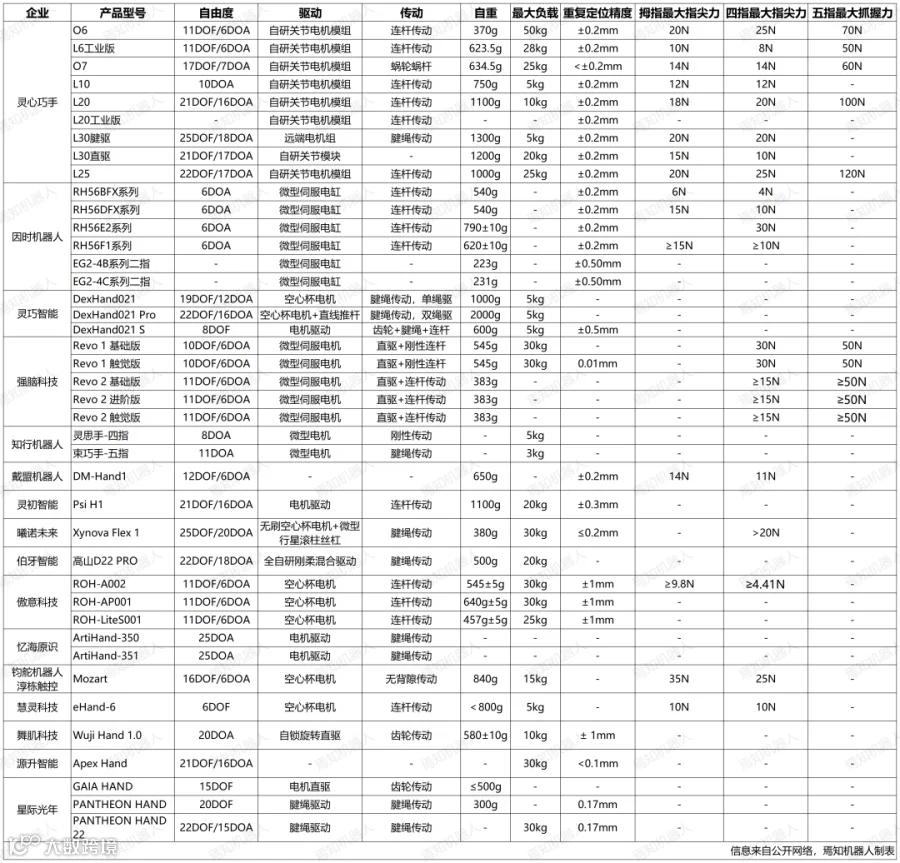
多维专精型灵巧手企业以技术深度为核心竞争力,聚焦高自由度、多模态感知与仿生结构设计,推动灵巧手向类人操作能力演进。其技术路径以全主动驱动、混合传动(如腱绳+连杆)及高密度传感器集成(触觉、力觉、视觉)为特征,自由度普遍突破20个。此类企业通过自研算法优化动态抓取策略,支持复杂场景下的自适应操作,如易碎品分拣、工具使用等,并逐步构建开源数据集与仿真平台以降低行业开发门槛。然而,高精度部件(如微型行星滚柱丝杠、高密度触觉传感器)依赖进口导致成本居高不下,且量产工艺稳定性仍需突破。
02
本体驱动型灵巧手企业
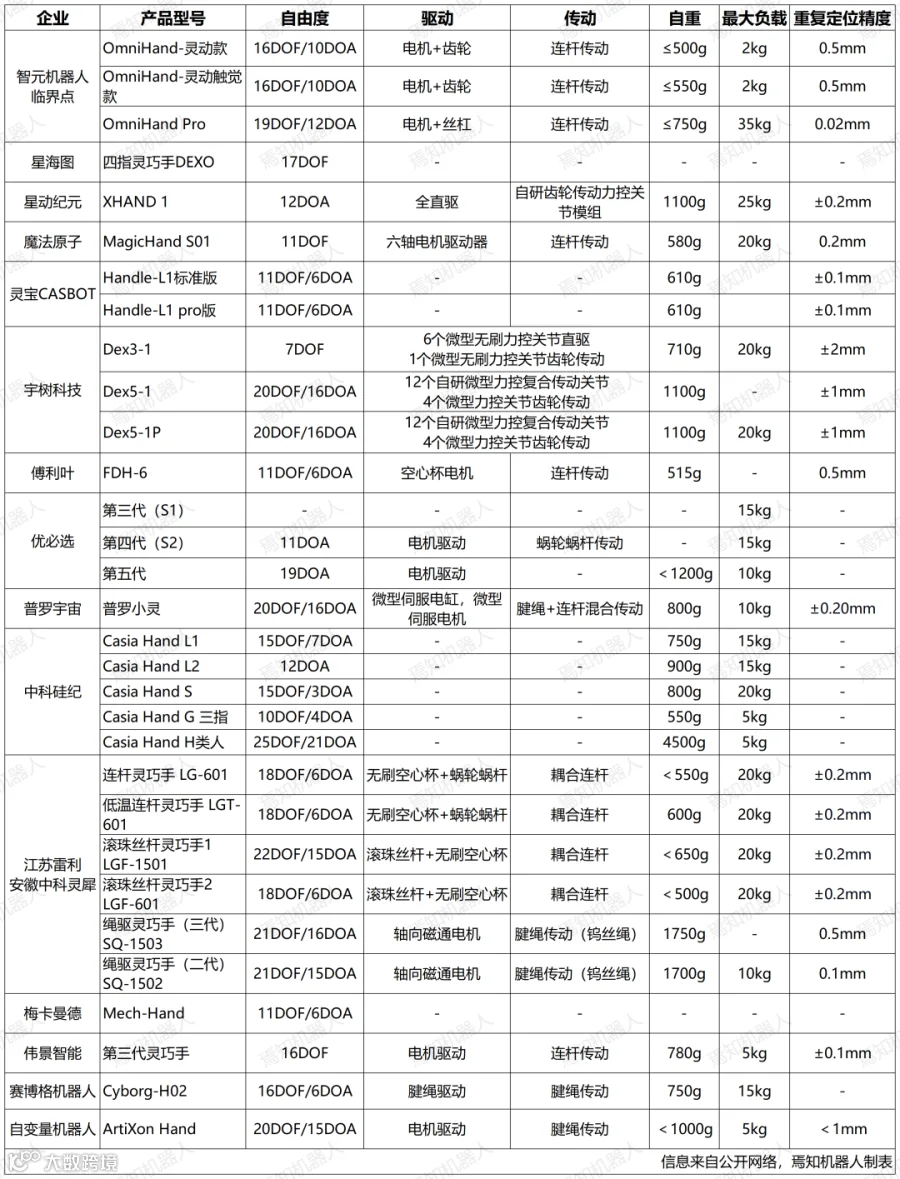
本体驱动型灵巧手企业以机器人整机厂商为主,强调灵巧手与本体系统的深度协同。其技术路线围绕“手-脑闭环”展开,通过自研灵巧手优化机器人操作能力,实现任务泛化与模型训练数据闭环。此类企业通常优先采用全直驱架构以提升控制精度,通过电机直接驱动关节消除传动间隙,实现高精度、高响应的力与位置控制;但针对大负载或成本敏感场景,部分企业也会选择混合驱动(如电机+丝杠+腱绳)或柔性传动(如腱绳+连杆)方案,以平衡性能、成本与应用需求。
03
部件延伸型灵巧手企业
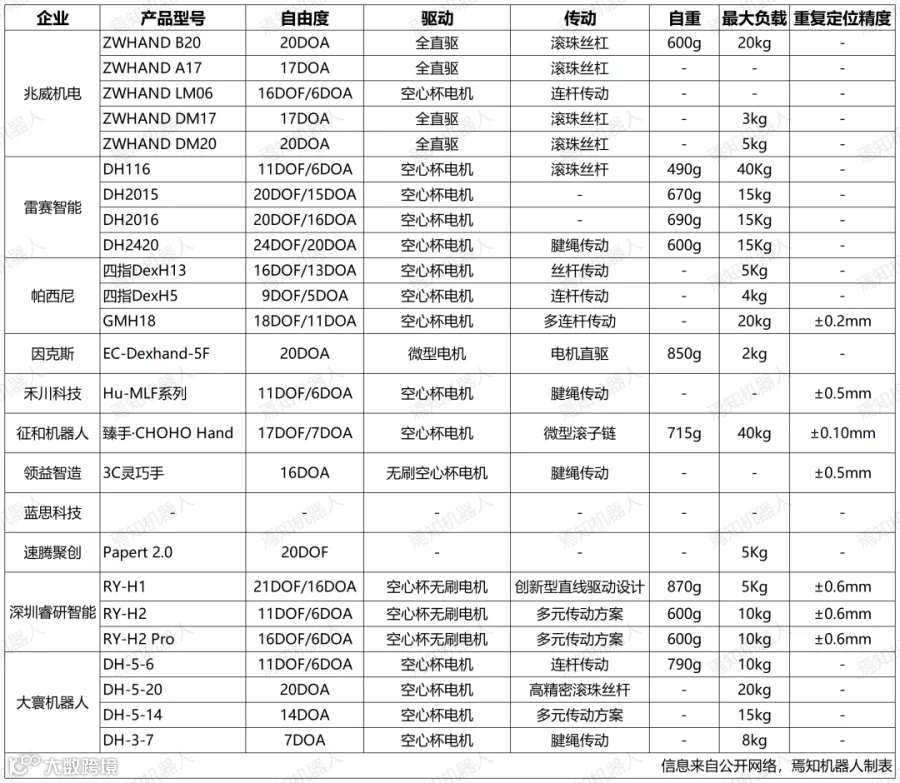
部件延伸型灵巧手企业依托传统精密制造技术优势,向灵巧手核心部件领域延伸布局。其技术路径以微型化、高精度的驱动/传动/感知部件(如空心杯电机、谐波减速器)为核心,结合标准化接口设计提供高性价比解决方案。此类企业通过规模化生产降低边际成本,例如将微型伺服电缸体积压缩40%,单指负载能力提升至10N以上,并推出模块化关节模组以适配不同本体需求。尽管在核心算法与系统集成能力上弱于前两类企业,但其供应链整合能力与成本控制优势显著,尤其在工业场景中通过“驱动+传动+控制”一体化方案快速抢占中低端市场。
(来源:RIO机器人)