

上一期博动学院,我们就【博动学院】高位脊髓损伤者适合使用高活动型手推轮椅吗?话题进行了简单的探讨,收到了很多用户的提问。对于高位脊髓损伤者来说,良好的坐姿摆位更加有难度却十分必要。关于高位截瘫的轮椅使用者到底还能不能坐好坐稳、为什么自己以为“适配”的坐垫靠背坐上还是不舒服等等问题,都要具体问题具体分析。

延续上一次的主题,我们接下来针对稳定度与活动度之间的关联进一步讨论。在物理治疗的领域中,我们常常听到这一句十分熟悉的话:
“近端稳定度决定远端活动度 (Proximal Stability before Distal Ability)”这句话可以说是在动作康复领域被奉为圭臬的概念。实际上这是一个运动原理,根据动力链(kinematic chains)理论之基础,说明核心力量的发展与躯干的稳定度能够进一步促进远端肢体的动作。
何谓动力链(kinematic chains)?
动力链的概念最初是由机械工程师F.Reuleux于1875年提出的。而在之后Steindler博士将这一概念应用于人体和运动,他将运动链定义为“几个连续排列的关节,共同组成一个精巧安排的复杂运动单元”,简单来说也就是……任何运动都不是单一关节的运动,而是牵涉到一连串各环节的动作相互配合来完成。

人体动力链是指身体各部分的关节与肌肉,以及它们所连接到的脊柱部分相互联组一同运作。上肢运动链即是由手指、手腕、前臂、肘部、上臂、肩膀、肩胛骨和脊柱组成。试想一下,刚刚开始学习动作的小婴儿,是不是先发展头颈部控制的能力后,接下来发展躯干核心力量以翻身、坐起,待能够自己稳坐的时候,才能够空出双手探索这个世界?抑或是回想一下,当我们拿毛笔写书法的时候,若是将近端的手肘固定靠在桌面时,相比手肘悬空的状况下,手腕及手指头握笔时的控制能够更加稳定?
简单的说明了何谓动力链后,相信您心中应该已经有了这个“近端先于远端”的概念。但接下来,我们该如何将此理念实际地运用在辅助科技方面,以促进您的驱干稳定度,进而使您呈现更利于发挥上肢功能的坐姿呢?

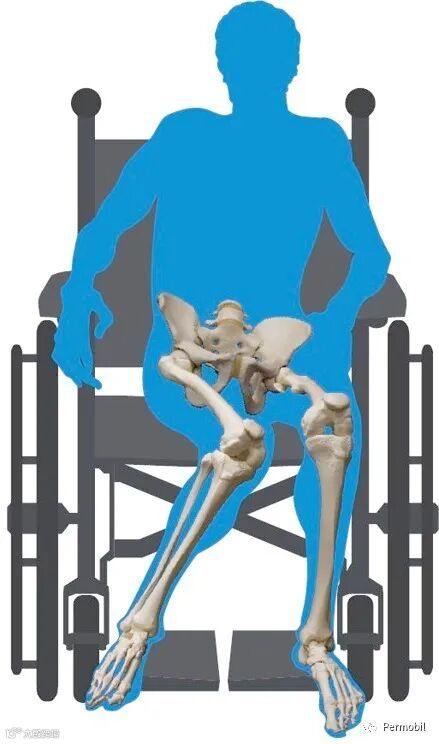
对于轮椅使用者而言,需要首先考虑的是人体在坐姿下脊柱坐落的基础——骨盆。促进坐姿稳定基础的方法之一,便是使用合适的辅具来矫正尚可回复的骨盆歪斜及旋转,让骨盆尽量回到正中位置上。但若变形的状况经判断为不可回复的固定式骨盆异常姿态,则需要顺应其变形以增加稳定度。例如四边可调的坐垫便能够很好的随异常姿态进行个人化调整,若为高位截瘫人士亦可选择具有泡棉底座的气垫座,复合式的设计能让协助使用者在减压、骨盆调整与座面稳定度间找到最合适的平衡。
轮椅配置方面,为了提升人体近端的稳定度,轮椅的座深和座宽是至关重要的参数。
座椅过宽的状况下,骨盆可能会失去侧向支持的稳定性,容易造成骨盆的歪斜及旋转;
座深太短或太长,则很难在矢状面上保持骨盆于正中位置,使骨盆呈现过度前倾或后倾的不良姿势。




