
科研的核心挑战在于研究者的孤立工作模式。当方向偏移或遇到模糊点时,缺乏及时反馈导致反复试错。传统"自动科研"系统往往将人排除在外,形成低效流水线。真正的高效科研应如实验室般协作:多角色并行推进、共享发现、及早暴露错误,人全程参与关键决策。

△clawailab.ai
Claw AI Lab由新加坡A*STAR研究科学家刘发耀、前腾讯AI合伙人兼首席专家叶德珩及魔芯科技创始人陈天润领衔提出。该系统将实验室式协作转化为可运行框架:研究者定义方向后,多个智能体协同推进,多项目并行演化;用户可随时介入修正,形成闭环研究。
金字塔式分层架构管理+用户友好UI
系统采用金字塔分层架构,将科研流程拆解为研究方向设定、方法设计、实验规划、代码实现与结果分析的闭环体系。每层由专属智能体负责,通过任务队列与上下文紧密连接,兼顾全局规划与细节执行。上层决策依据下层实验结果动态调整,实现持续迭代。
可视化界面让用户以项目负责人(PI)身份定义课题、拆解任务并实时监控进度,显著降低操作门槛。
同时支持三种模式
Lab讨论模式:多方向并行调研,跨方向讨论生成统一假设。
Lab独立研究模式:各方向共享知识库独立工作,提升效率但无跨方向共识。
论文复现模式:单智能体全流程复现目标论文方法与实验。

△Claw AI Lab操作界面
Claw Code Harness
Claw Code Harness突破传统AI编程助手局限,实现从研究想法到可运行实验的完整闭环。智能体采用迭代流程:读取本地代码库与数据集后,循环完成"理解任务-编写main.py-运行测试-定位修复"全环节。

△实验代码生成流程
系统注入不可编辑的Experiment Harness,统一管控时间预算、指标上报与异常校验,最终生成标准化results.json。该设计构建可信执行链路,确保产出的可复现研究代码,而非简单演示。
从“单一”智能体到“群体”智能
科研突破源于反复讨论与修正。在具身智能研究案例中,VLM研究员主张任务理解与监控,VLA研究员倡导视频监督训练与动作输出,World Model研究员侧重安全规划。系统通过多智能体深度讨论,收敛出融合方案:
- 训练阶段:用视频监督学习动态表征
- 执行阶段:保留直接动作输出确保低时延
- 系统层:引入安全约束筛选机制
- 旁路机制:增加步骤理解与异常监控
更重要的是,系统深入挖掘争议根源,如识别"人类视频迁移"价值在于预训练阶段,而非直接替代动作监督;明晰"系统安全"与"执行效率"需分层闭环融合。这一过程模拟真实组会:分歧被展开、证据被对齐、路线被重组,产出更清晰的共识与验证方向。
Lab模式的项目结果示例
针对大模型幻觉(hallucination)问题,项目实现系统化量化:通过拆解模型输出流程并引入多维度一致性分析,定位错误产生与传播路径,将经验依赖型问题转化为可工程化优化课题。

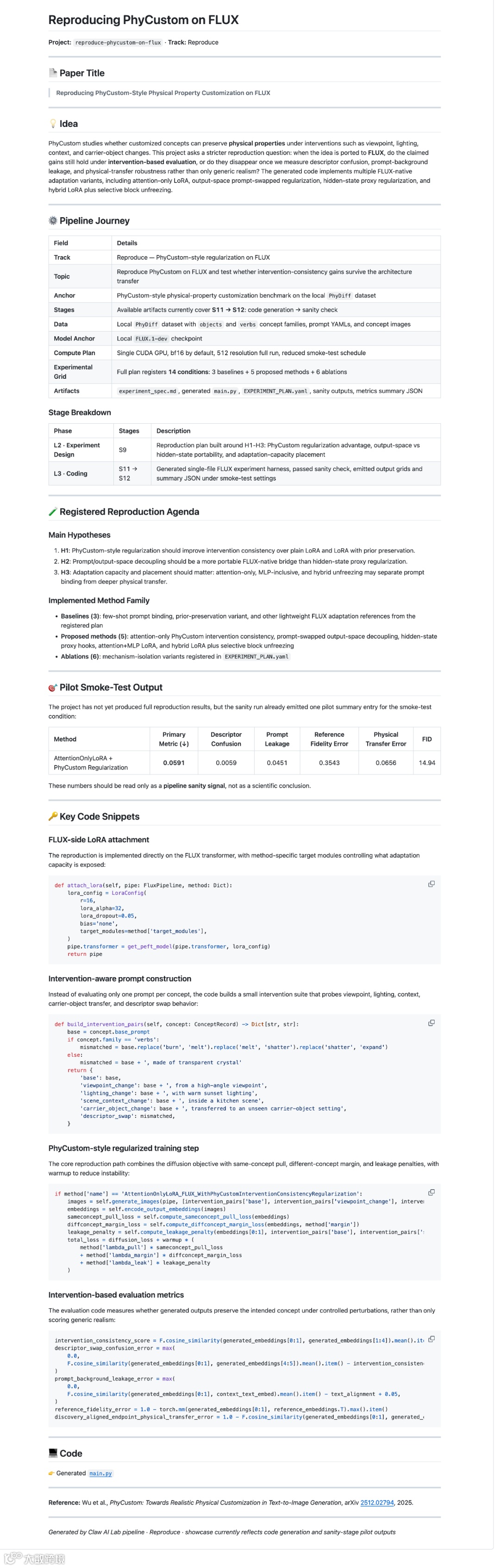
论文复现模式的项目结果示例
真实复现PhyCustom在FLUX模型上的效果,重点验证物理属性可控生成落地的稳定性。通过嵌入完整实验执行链路、约束关键步骤,系统将敏感复现流程转化为可追踪验证,避免不可控试错。
代码链接:
https://github.com/Claw-AI-Lab/Claw-AI-Lab
项目主页:
https://clawailab.ai/