
本文已发表于《公路》
摘要
交通基础设施与自动驾驶车辆之间的协同能提高自动驾驶的安全性和可靠性。通过对自动驾驶车辆功能局限性进行分析,找出自动驾驶车辆对路侧交通设施的潜在需求,从功能角度将路侧交通设施分为常规交通管理设施、交通协同设施、基站及网络设施、高精度定位设施及路内服务设施等,构建了车路协同路侧交通设施体系;在此基础上,从路侧设施配套分级设置的角度,提出四级自动驾驶道路分级标准,以及配套路侧设施设置要求,细化完善当前自动驾驶“路端”管理方面的技术要求,为管理部门提供参考。

0
引言
从国内既有研究看,针对车路协同场景下的自动驾驶研究主要分两个方面,一是针对“车端”的研究,目前已有大量高新技术企业围绕自动驾驶车辆进行了大量的研究,并已有很多试验产品,研究成果比较成熟;二是针对“路端”的研究,主要是要从城市交通的角度提出面对自动驾驶环境下的城市道路路侧设施需求和设置方法,但目前相关研究较少。但是,自动驾驶要进入实际应用,不仅仅要解决“车端”和“中心端”的问题,还需要同步解决“路端”的问题。“路端”亟待解决的问题是如何定义自动驾驶道路分级体系,以及明确配套的路侧设施要求。
为了应对国内自动驾驶技术的快速发展,国内也开展了自动驾驶道路分级体系的研究工作,文献[1]将交通基础设施分为 6 级,分级标准包括信息化、智能化和自动化等多个维度,中间层级之间界限不清晰,也未考虑配套路侧交通设施的要求。文献[2]对公路环境下的自动驾驶附属设施提出了总体技术要求,但未就不同自动驾驶道路等级进行区分。此外,文献[3]从分析了高速公路环境下的车路协同自动驾驶系统框架,文献[4]从车路协同的角度对道路规划和设施建设提出了设想,文献[5]提出了自动驾驶普及情形下城市道路规划与设计的一些思考。
但既有研究缺乏实际操作的具体要求,还需要从自动驾驶车辆对道路的服务功能需求出发,构建路侧交通设施构成要素的体系,以及基于路侧设施分级设置的自动驾驶道路分级标准,并提出对应的路侧交通设施设置要求,进一步细化完善当前自动驾驶“路端”管理方面的技术要求,满足当前自动驾驶即将进入普及阶段情形下,城市道路交通设施的建设和管理需求。
1
自动驾驶车辆功能局限性分析
根据国内外的主流划分标准,自动驾驶分成0-5级,各个级别的界定主要是根据车辆的控制权限、目标和事件探测与响应,动态任务接管和设计运行条件等来进行确定的。根据对自动驾驶车辆功能的分析可以看出,从实际道路运行效率和车辆成本综合效益最优的角度,目前自动驾驶车辆还存在一定的功能缺陷,例如:
(1)超出车载检测设备“视域”范围的识别局限
受制于车载检测设施的高度和角度,当出现临近物体(如相邻车道)遮挡时,难以识别障碍物、路口交通信号灯状态等信息,存在安全隐患,需要路侧设施(如路口监控设施、RSU)辅助检测并及时发送信息给自动驾车辆。

图1 超出车载检测设备“视域”范围的障碍物识别
(2)超出车载检测设备“视距”的识别局限
受制于车载检测设施的性能局限,当前方道路突发拥堵等状况时,难以及时识别前方道路信息,从而提前做出路径优化,需要路侧设备辅助进行交通状态监测后,及时将道路交通状态信息发送给自动驾驶车辆。
(3)决策算法无法覆盖所有的驾驶场景
交通状况非常复杂,边界不够明显,自动驾驶车辆的驾驶行为决策算法难以完全覆盖各种各样的交通场景,因此当自动驾驶过程中遇到在场景算法库以外的情景时,就可能存在错误驾驶行为的可能性。
(4)复杂信息的综合处理成本较高
自动驾驶级别越高,需要车辆对环境信息的感知能力和信息处理能力就越高,假设这些分析处理能力都依托车载设备来完成,则将大幅提升自动驾驶车辆的成本,对未来普及应用带来障碍。
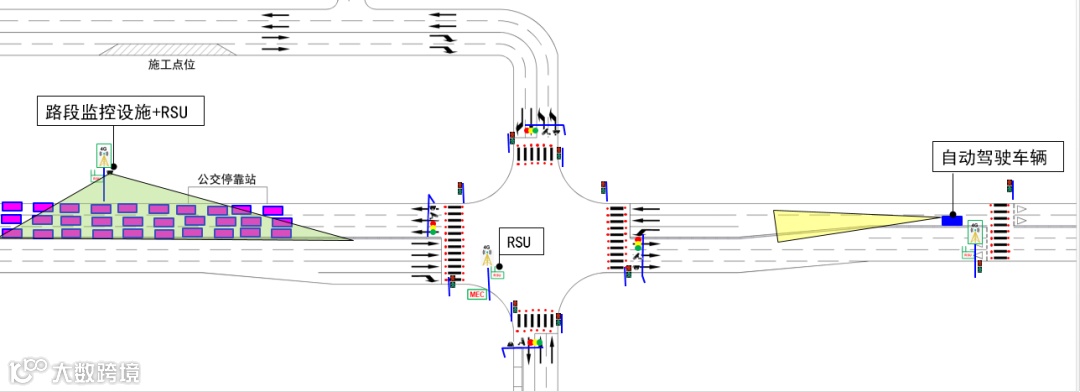
图2 超出车载检测设备“视距”的监测盲区
总之,如果想要通过完全依靠自动驾驶车辆实现完全自动驾驶成本是巨大的,也是非常困难的,对未来的推广应用存在较大限制。因此,需要根据自动驾驶车辆的功能局限,对道路设施进行配套完善,弥补自动驾驶环境下的道路信息感知、处理和决策支持相关的能力,确保自动驾驶更加安全、可靠。
2
车路协同路侧交通设施体系构建
为了协调车辆行驶需求与通行资源供给之间的关系,需要部署路侧智能网联交通设施,快速整合和分发各类设备与车辆的碎片信息,将人、车、路、环境等要素协同起来,服务自动驾驶车辆。具体而言,路侧设施主要可以从以下5个方面来提高自动驾驶的安全性和可靠性:
(1)交通状态全息感知
自动驾驶对交通信息的全面性和综合性提出了更高的要求,车端感知能力的存在感知范围有限、遮挡盲区等制约,需要通过路侧交通设施来完成。
(2)快速稳定通信渠道
自动驾驶对信息的实时性和可靠性要求更高,需要在路侧设备与车辆之间的通信,以及路侧设备与控制中心(云端)之间的建立可靠、实时、多模式的通信传输渠道,实现毫秒级通信频率。
(3)复杂环境辅助决策
在十字路口、坡道、隧道、桥梁等复杂交通场景,或者发生交通事故、复杂的气候条件等情景下,自动驾驶难度较大,需要通过路侧设施从更强大的控制中心获取辅助决策的信息。
(4)多元数据融合能力
自动驾驶需要各种传感器的检测信息,包括车辆信息检测、交通状况检测、路况信息检测、交通气象信息检测等,通过对这些检测信息进行融合处理,才能获取自动驾驶可用的信息。
(5)高精度地图支持
自动驾驶在进行无人驾驶情景下,需要对道路场景进行更精细的感知(厘米级),仅通过车载设备实现成本太高,且难以做到全程覆盖(如隧道、桥涵等),需要路侧设施进行补充修正。
根据自动驾驶道路等级及功能需求分析,路侧交通设施应包含常规交通管理设施、交通协同设施、基站及网络设施、高精度定位设施及路内服务设施等,如图3所示。

图3 面向自动驾驶的路侧设施分类体系
3
自动驾驶道路分级及路侧设施
设置要求
3.1 自动驾驶道路分级标准
本次研究结合自动驾驶车辆对路侧设施的功能需求,从路侧设施配套界限清晰的角度,提出四级自动驾驶道路分级标准。
(1)初级自动驾驶道路(Ⅰ级)
能够对主要路口进行交通状况实时感知,并单向给自动驾驶车辆发送交通信息,实现无人驾驶需车端具备很强的感知能力和驾驶行为决策系统。
(2)中级自动驾驶道路(Ⅱ级)
能够对路口和路段进行交通状况实时感知,并可以在数毫秒内单向给车辆发送交通信息,可根据交通状况自动优化路口通行权,实现无人驾驶需车端具备较强的感知能力和驾驶行为决策系统。
(3)高级自动驾驶道路(Ⅲ级)
能够对全路段进行交通状况实时感知,并可以在数毫秒内为单个自动驾驶车辆提供交通信息和驾驶参考信息,具备设置自动驾驶专用车道条件,可根据交通状况自动优化车道通行权;无人驾驶情形下,车端交通感知能力要求不高,但需要较高的驾驶行为决策系统。
(4)完全自动驾驶道路(Ⅳ级)
能够对全路段交通状况进行高精度全息感知,道路具备完全自动化交通管控能力,可以满足所有单个自动驾驶车辆在所有场景下完全感知、预测、决策、控制、通讯等功能。无人驾驶情形下,车端交通感知能力和驾驶行为决策系统要求达到基本要求即可。
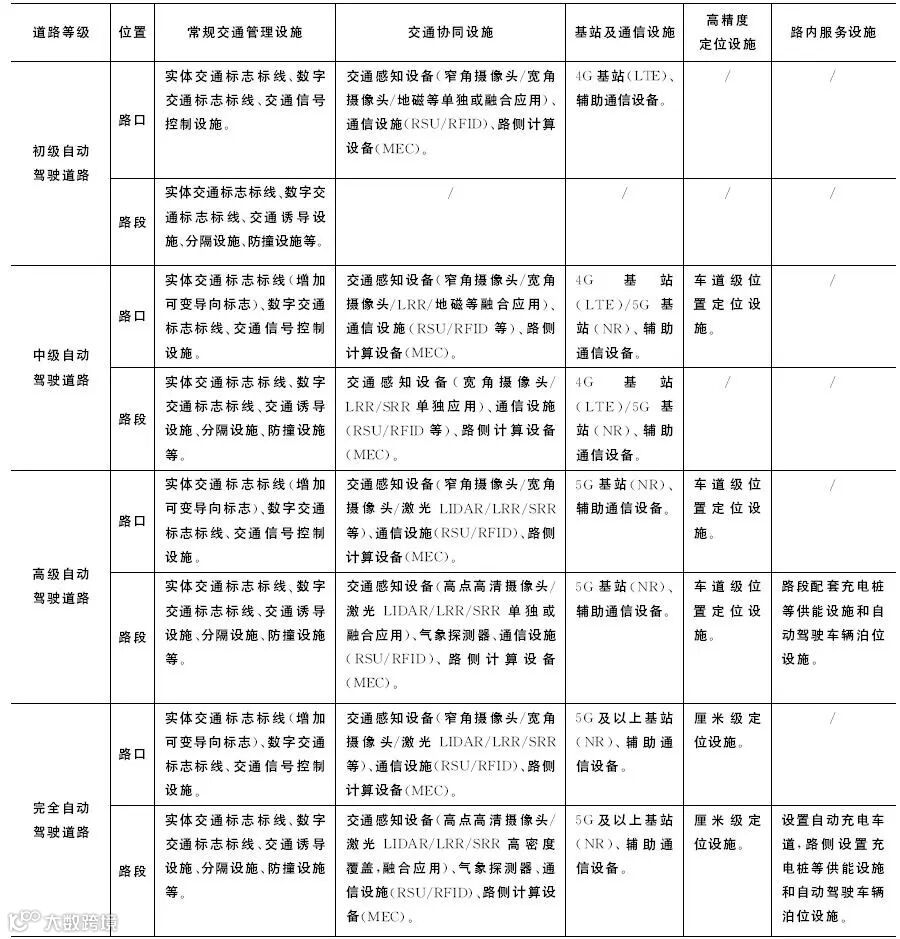
各级自动驾驶道路功能要求如下表:
表1 自动驾驶道路配套路侧设施列表

3.2 自动驾驶道路路侧设施设置要求
结合自动驾驶道路的功能划分标准,配套的路侧设施要求如下:
(1)初级自动驾驶道路
设施主要覆盖十字路口、T/Y型路口、人行过街路口、环岛路口等重要路口,路段满足常规交通管理设施设置的规范要求。
(2)中级自动驾驶道路
设施实现路段全覆盖,路口和敏感路段实现高精度覆盖。
(3)高级自动驾驶道路
路段全覆盖,路口和敏感路段实现高精度覆盖。
(4)完全自动驾驶道路
路段全覆盖,实现高精度覆盖。
具体路侧设施设置要求如下表所示:
表2 自动驾驶道路配套路侧设施设置要求
4
结语
为了更好地应对自动驾驶技术的落地和商用化,本文从交通安全角度分析自动驾驶车辆对路侧设施的需求,系统构建面向开放式场景下的自动驾驶路侧配套交通设施分类体系及内涵,为规范路侧交通设施提供基础。
同时,本文在分析自动驾驶车辆的功能需求,提出一套层级更加清晰的自动驾道路分级体系,并明确了不同自动驾驶道路等级需配套的路侧交通设施,为交通建设和管理部门提供技术指引。
作者 | 交通规划五所 熊文华、胡少鹏、王佩、张杰华
编辑 | 技术质量所






