
在电网运维向智能化、数字化迈进的过程中,三维点云数据模型的重要性日益凸显。

何为点云?点云是某个坐标系下表达目标空间分布和目标表面特性的海量点集合,在获取物体表面每个采样点的空间坐标后,得到的是点的集合,称之为“点云”。每个点都包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值、时间、回波强度等等。

高精度三维点云数据通过算法拟合生成曲面,用于三维建模,精度高,细节更精细,同时,建模速度快。基于三维点云模型,运维单位可以搭建设备信息管理数据库,实现线路可视化、数字化;还可规划无人机自动化飞行航线,大幅提升巡检效率。

其中,城区配网的三维点云模型采集和无人机自动飞行一直是业内难题。配网环境复杂:线路杆塔位于人、车通行道路之间,空间狭小,两侧宽度 10~20 米不等;线路通道两边建筑物高于杆塔高度 2~10 倍;线路两侧的树木也可能会高于导线和杆塔;周围楼房之间、杆塔之间常有斜拉线;遮挡情况导致无人机 GPS 卫星信号差。

要完成近距离(3m 以内)和多角度(杆塔的上、左、右、下)有效巡检,无人机飞手的巡检技术水平和心理素质都面临着巨大考验。要解决城区配网的自动化巡检问题,首先要能生产高质量的点云数据,把复杂工况场景中的细节全部扫描出来。
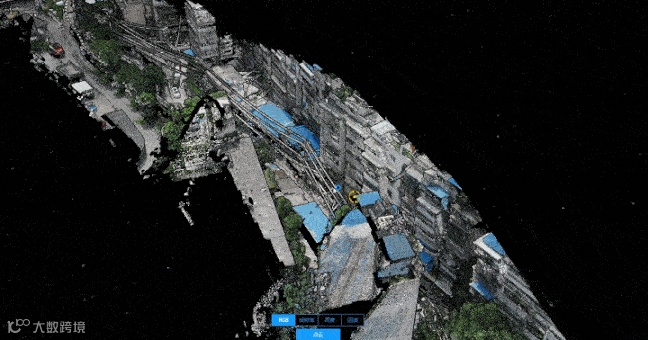
近日,大疆行业应用联合合作伙伴,使用经纬 M300 RTK 搭载 L1 激光雷达,1 架次 10 分钟完成 1.9 km的南网某城区 10kV 配网点云数据采集;使用大疆智图软件,13 分钟完成 6.43 GB 的数据处理,生成模型,有效解决了这一业内难题。
L1为配网巡检解决了哪些问题?
点云采集
可解决城市配网架空线路通道工况下难以通过可见光相机的方式进行高精度、高质量点云数据采集的问题,包括:1. 可见光采集设备无法通过实体遮挡物采集到更下层的细节;2. 可见光采集设备在采集架空线路数据时,需要一定长度的横向外扩飞行,当飞行外扩距离大于周边建筑物与杆塔的距离时,由于建筑物高于杆塔,外扩飞行所拍到的可见光照片都是建筑物顶部,使得需要建模区域无法保证有效的外扩重叠率而造成点云模型缺失。
无人机精细化巡检
传统人工手动控制无人机在配网架空线路复杂的工况中飞行并进行精细化巡检,很难保证无人机驾驶员在保持安全距离的情况下拍出符合标准能够分辨杆塔缺陷的照片;且巡检照片的质量和数量会随着不同无人机驾驶员的技术水平、抗压能力和责任心等因素影响而产生较大的波动,不利于机巡作业数据的标准化生产。大疆 L1 生成的点云模型可用于规划无人机自主飞行航线,从而进行配网架空线路高质量且标准统一的无人机精细化巡检。

用电高峰巡检:城市配网架空线路的用电负荷主要开始于每天工作结束后,主要集中在每天傍晚 18:30-22:00 之间。人工操作无人机在这个可见光线不足的时段进行巡检飞行是风险极高的行为,而基于大疆 L1 激光雷达采集的点云模型所规划的无人机自主飞行航线,让这一目标得以实现,可以开展夜间工况下对架空线路易发热点的巡检测温工作;这是人工控制无人机巡检和日间无人机巡检所不能做到的。

扫码关注我们
查看更多精彩内容