
ABB机器人用Smart组件创建动态输送链夹具SC_Gripper步骤如下:
1.基本——浏览库文件。

2.找到输送线SC_BeltConveyor打开。

3.点击是。

4.SC_BeltConveyor断开与库的连接。

5.建模——固体——矩形体。
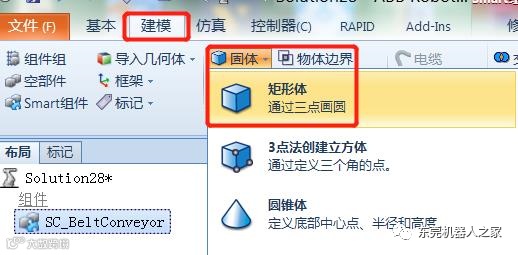
6.设置长宽高都是60mm并创建。

7.部件1重命名为产品,并修改设定颜色。



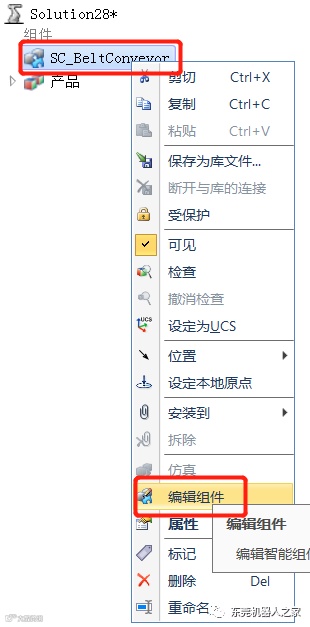
8.SC_BeltConveyor编辑组件。
9.长2000,宽160,SourceObject设为产品。

10.基本——ABB模型库——IRB1410

11.IRB1410机器人位置设定如下。


12.基本——浏览库文件。

13.导入Gripper组件。

14.建模——smart组件——SmartCompent_1。
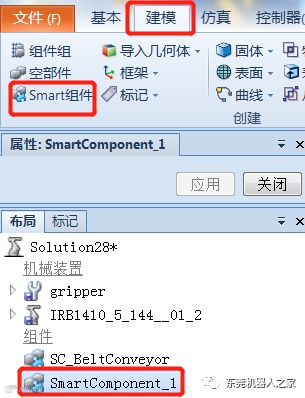
15.SmartCompent_1重命名为SC_Gripper。

16.SC_Gripper——组成——添加组件——传感器——Linesensor。

17.Linesensor参数设置如下。

18.gripper不可由传感器检测(不勾选就是)。

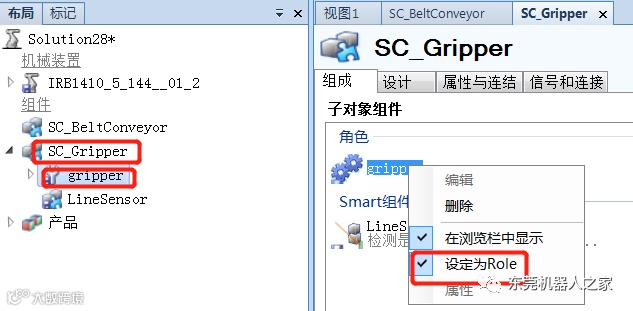
19.gripper放到SC_Gripper中去,并且设定为Role。
20.SC_Gripper安装到机器人上。

21.点击是。

22.添加组件Attcher。

23.Attcher中的Parent父连结是SC_Gripper。

24.添加组件Detacher。
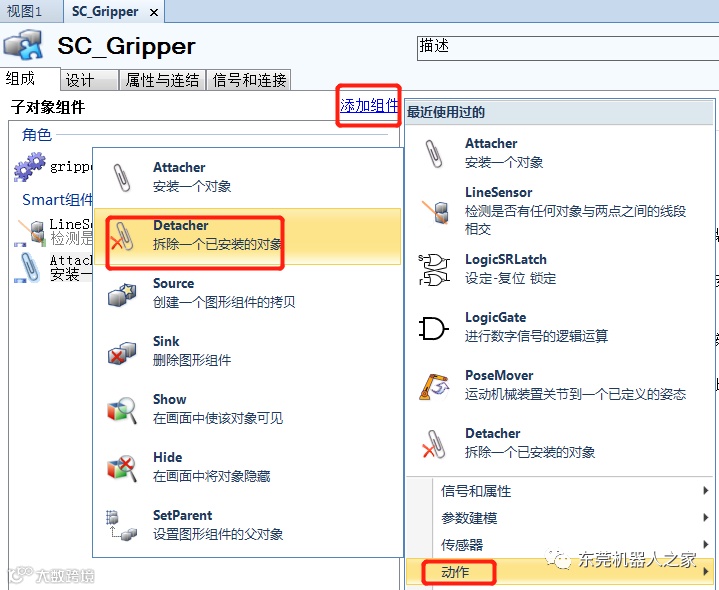

25.添加组件LogicGate取反NOT。


26.添加组件LogicSRLath。

27.属性与连结——添加连结如下。
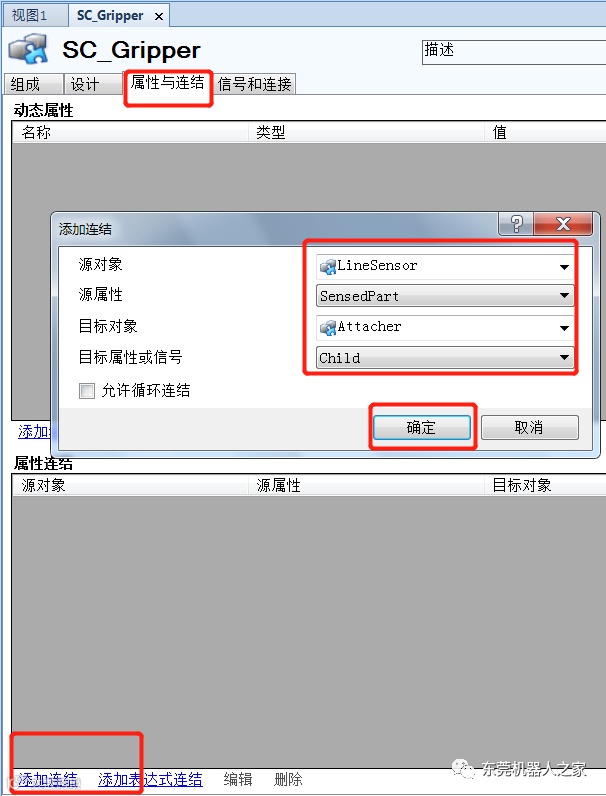
28.安装的子对象作为拆除的子对象。

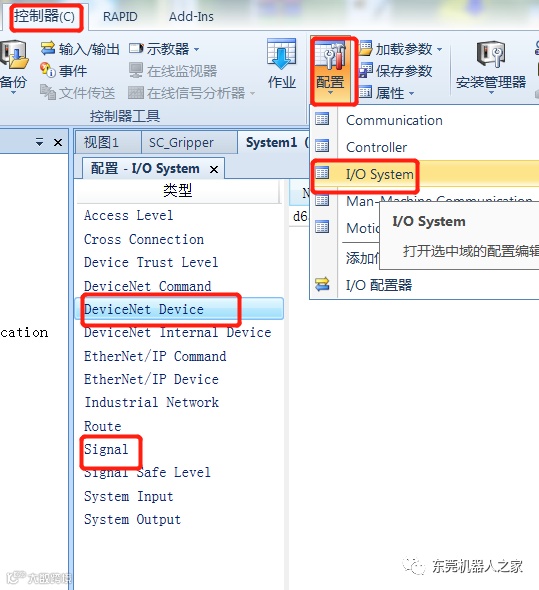
29.信号和连接——添加IO/Signals。
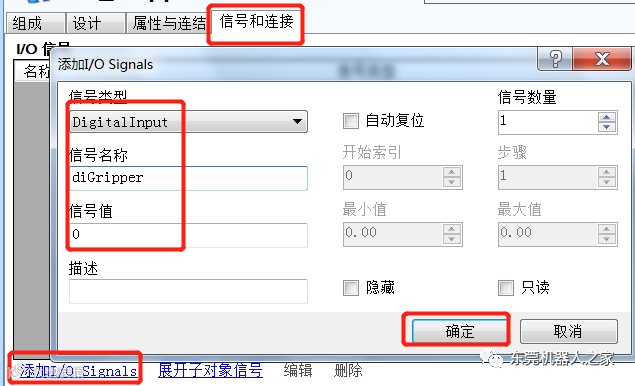
30.添加doBoxInPos

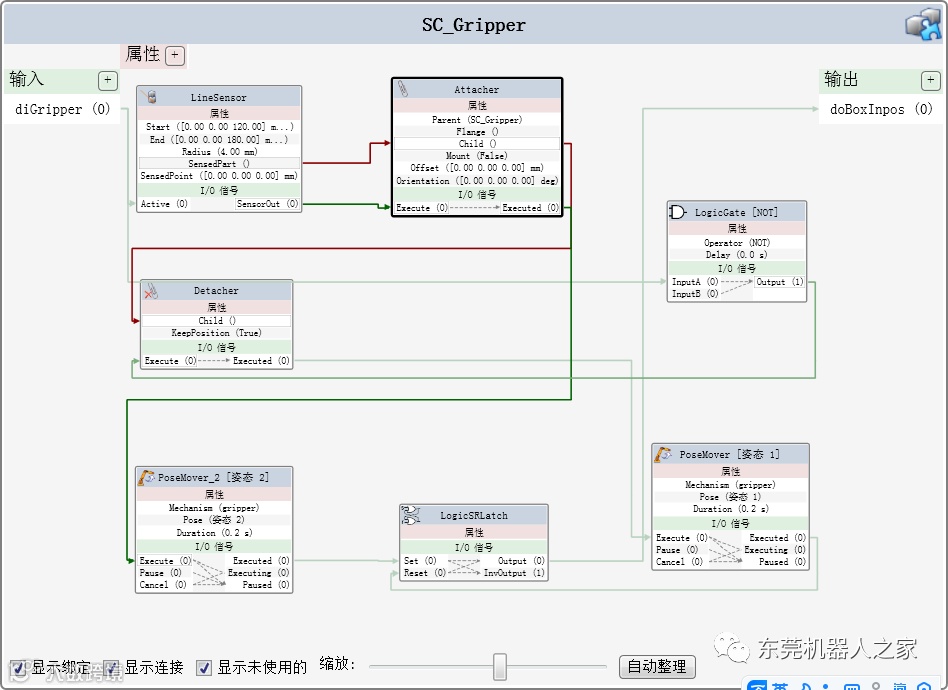
31.添加组件PoseMover关联夹抓Gripper松开和夹紧两个姿态。



32.设计连线如下:
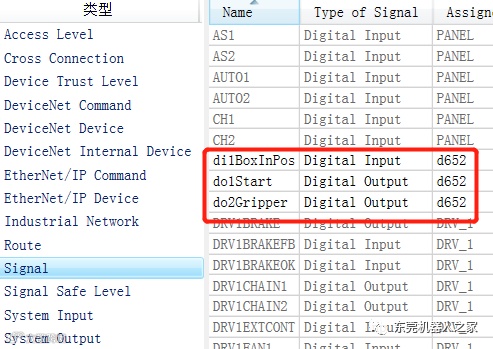
33.添加示教器IO板和信号。

34.仿真——工作站逻辑——设计如下:

35.机器人5轴90度。


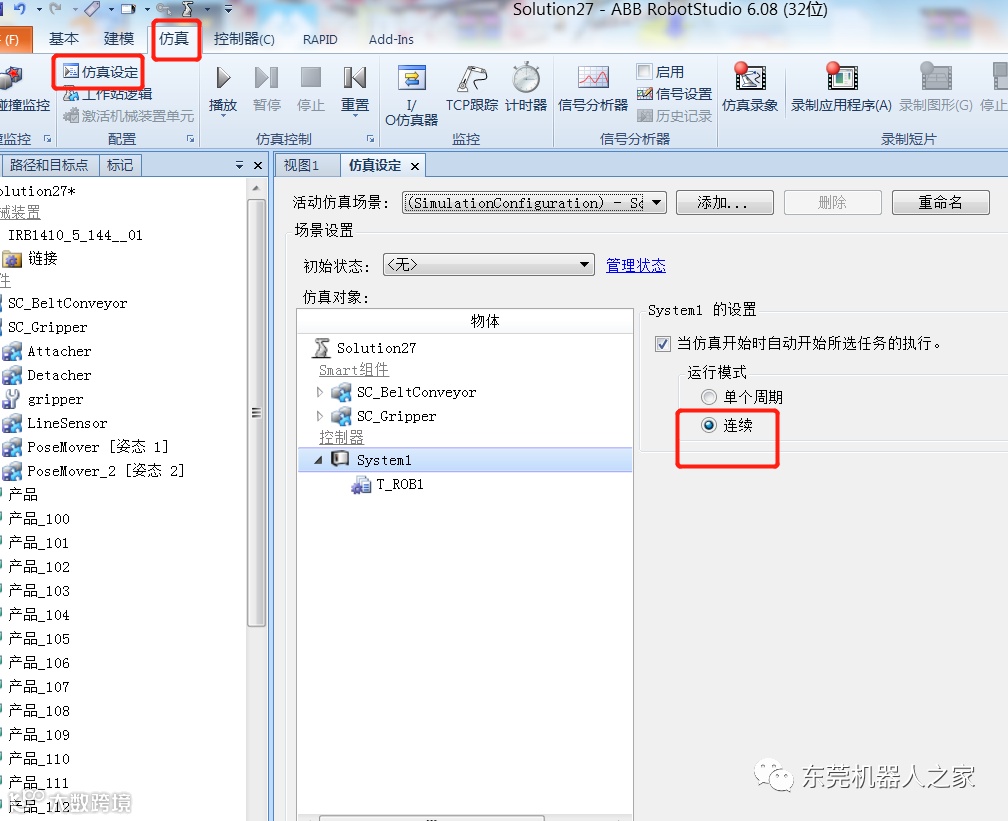
36.程序编写如下,并仿真设定为连续。
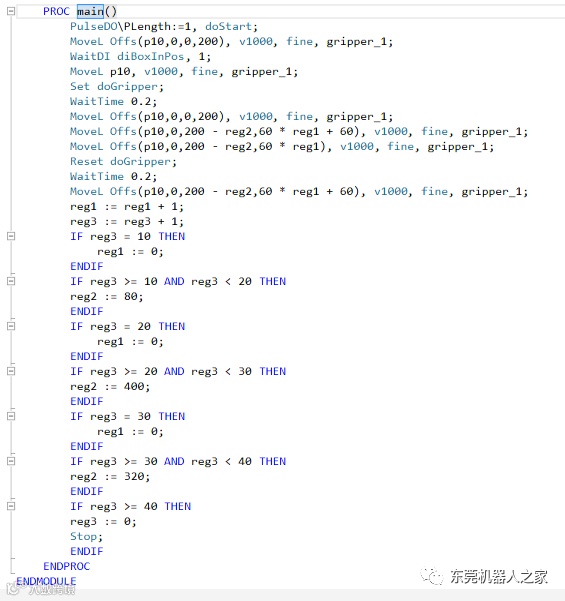
相关组件如下连接:
链接:https://pan.baidu.com/s/1Xslh9wWy5gnbw3YZQjuqrg
提取码:8888
复制这段内容后打开百度网盘手机App,操作更方便哦
▼东莞机器人之家,关注有惊喜 ▼ 
小编微信☜
公众号二维码☞
