方法一:
1)机器人由于发生碰撞等会报运动监控等错误。
2)此时如何移动?
3)示教器-控制面板-监控,将手动操纵监控暂时关闭。

如果机器人没有配置collision detection选项,此处无法关闭。
4)此时移动机器人,可能由于机器人依旧卡死或者移动时速度过快,依旧会继续报碰撞错误。
5)点击示教器右下角的快速设置,点击第一行的机器人图标,点击显示详情,找到摇杆设定速度,把速度百分比设到10%左右(此为手动摇杆速度,快速设置倒数第二个速度为程序运行速度),慢慢移动机器人。

方法二:
伺服电动机的制动解除
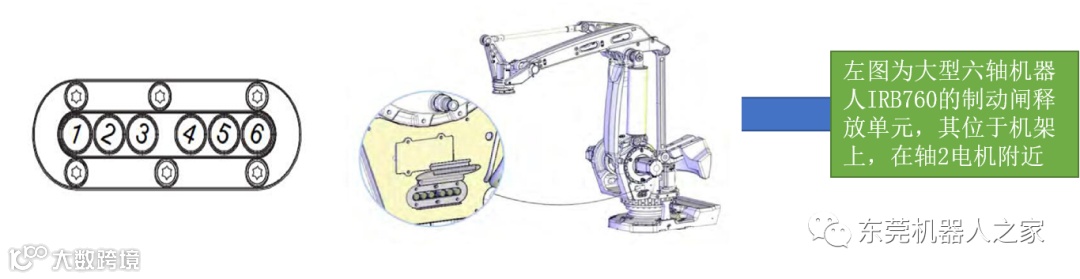
在实际操作中,有时由于操作失误、工作站内物品位置发生改变等情况而导致机器人本体发生碰撞而卡住,无法通过示教器手动操纵等方式移动机器人。要解决这个问题,可以通过释放制动闸来解决。
制动闸释放单元位于机器人框架或底座上,或位于机器人控制上。根据机器人型号,位置可能稍有不同。制动闸释放单元有一块护板或夹具保护。通过制动闸释放单元可以释放对应的机器人轴。
大型机器人每个轴都有一个释放按钮,对于四轴机器人,按钮4、5闲置。
对于小型机器人型号,六根轴共用一个释放按钮(比如:IRB1200,IRB140,IRB910SC,IRB1410,IRB360等),通常位于机器人基座背面。

往期精彩回顾:
1.FANUC机器人DI/DO、GI/GO、UI/UO、RI/RO信号详解
2.ABB机器人集成视觉调试步骤详解
3.ABB机器人与康耐视相机视觉通讯程序
4.ABB机器人用Smart组件创建动态夹具SC_Gripper
5.ABB机器人离线仿真smart组件创建动态输送链
6.ABB机器人示教器点位移动和指令及输入整数小技巧
7.ABB机器人区域监控(608-1World Zones)的I/O信号设定
8.ABB机器人与康耐视视觉通迅程序(二)
9.FANUC机器人快速创建仿真程序。
10.用一个按钮控制三个(组)灯
11.ABB机器人升降系统的方法
12.KUKA机器人组输出和组输入信号
13.ABB 机器人弧焊IO信号的关联
14.神奇PLC还可以分别计算鸡腿兔腿各多少只
15.ABB机器人608-1区域监控20210108_212205
16.KUKA机器人保养
17.KUKA工业机器人接线解析
18.安川机器人仿真软件程序的创建
19.kuka机器人如何使用库卡机器人内部电磁阀
20.ABB仿真软件RobotStudio批量创建IO
21.PLC外部输入信号控制机器选择对应的程序
22.三菱FX3UPLC和ABB机器人232串口通讯详解
23.ABB机器人仿真软件RobotStudio介绍和安装以及破解
文章都看完了 不点个
不点个 和关注下吗
和关注下吗


