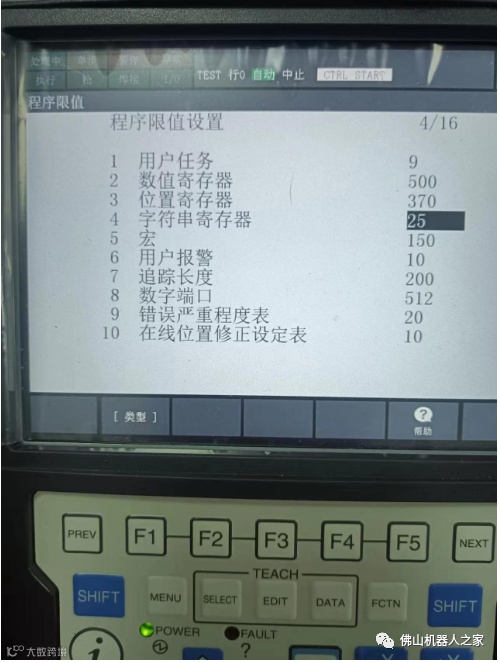
FANUC机器人使用过程中,默认的数值寄存器数量为200个,位置寄存器数量为100个。
如果在编程时,使用的寄存器的数量超过了上述的数量,就需要对寄存器数量进行扩展。
根据我们使用寄存器的数量多少,来考虑是否增加寄存器扩展功能软件(R830)。
如果我们使用的数值寄存器数量小于999,位置寄存器数量小于372。
如果使用的寄存器数量超过上述数量,需要增加寄存器扩展功能(R830)软件。
增加完该软件后,再进入到控制启动模式,更改寄存器数量。
此时,最大数值寄存器可达5000,位置寄存器可达2000。
需要注意的是:在增加寄存器扩展功能软件时,要求机器人系统的SRAM是3MB。
更改寄存器数量流程
揭秘FANUC机器人扩展寄存器数据大小方法如下:
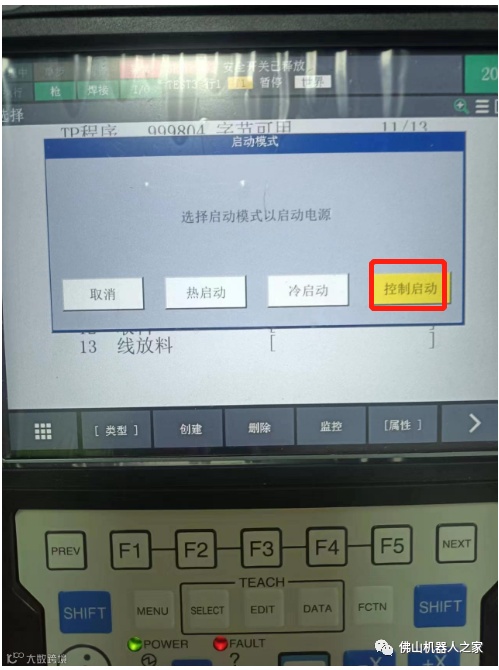
(1)在按下FCTN后,选择重新启动后,再选择控制启动模式。

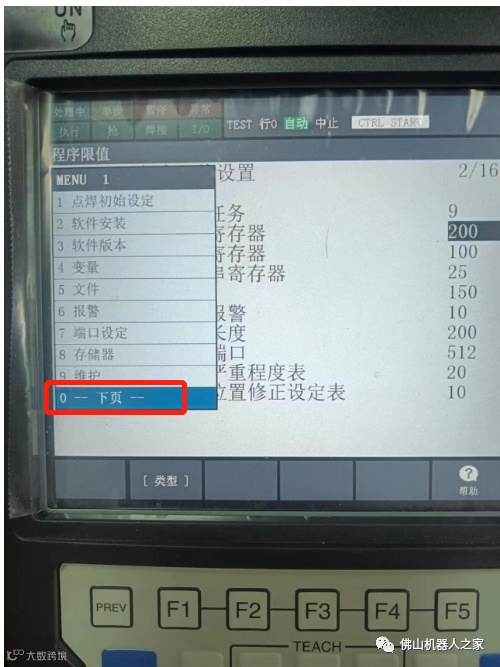
(2)进入控制启动模式(CTRL START)后,在【MENU】中选择下一页后再选择程序设置。

(4)完成设置之后,按下【FCTN】对机器人进行冷启动
(5)冷启动之后进入到一般模式,寄存器数量会根据输入的数量进行调整。
注意事项
NUMREG.VR和POSREG.VR文件记录的是数值寄存器和位置寄存器的配置参数。
没有寄存器扩展功能选项的机器人系统所备份出来的NUMREG.VR 和POSREG.VR文件,可以导入到有寄存器扩展功能的机器人系统中使用。
有寄存器扩展功能的机器人系统所备份出来的NUMREG.VR和POSREG.VR,在数量超出正常数量的情况下,不可以导入到没有寄存器扩展功能的机器人系统中使用。
往期精彩回顾:
如何在“东莞机器人之家”公众号搜索历史文章
ABB360蜘蛛手机器人校原点步骤
ABB 机器人 Multimove-联动同步功能
松下YD350GR5焊机和ABB机器人模拟量焊接
安川机器人码垛程序
揭秘ABB机器人用户权限丢失恢复步骤
ABB机器人与麦格米特焊机DeviceNet通讯设置解密
ABB机器人与康耐视相机视觉通讯程序
KUKA双工位码垛程序讲解
kuka机器人如何使用库卡机器人内部电磁阀
ABB机器人工厂真实压铸案例程序分享
kuka机器人蓄电池功能详解
ABB机器人圆柱体安全区域设置详解
ABB工业机器人两台或多台机器人DeviceNet的通信
三菱FX5UPLC多台PLC之间的简易CPU通信设置
机器人双工位CNC加工项目
ABB机器人通过定时中断程序适时获取机器人XYZ位置数据
ABB机器人用户自定义功能程序的方法
KUKA工业机器人接线解析
20.Fanuc机器人IO配置和UI/UO配置
21.松下YC-315TXL焊机带有专机接口,可直接配ABB机器人弧焊包使用。
22.kuka机器人如何使用库卡机器人内部电磁阀
23.ABB仿真软件Robotstudio手动单轴操作的三种方法
24.ABB机器人与康耐视相机视觉通讯程序
25.ABB机器人与康耐视视觉通迅程序(二)
26.ABB机器人升降系统的方法
27.揭秘ABB机器人的num型数据和 KUKA机器人的 INT 和 REAL之间的区别
28.安川机器人现场调试小结
29.FANUC机器人机架号汇总大全,强烈建议收藏并转发!
30.FANUC机器人机架号汇总大全,强烈建议收藏并转发!
31.ABB机器人双机协调酒杯干起来
 东莞机器人之家
东莞机器人之家
