那智机器人多任务设置
那智机器人最多可以同步运行 4 个用户任务。用户任务通过 1~4 的编号进行管理,通过用户任务监视器可以确认动作状态。
1.那智机器人多任务设置:监视器2——用户任务——用户任务监视器——设置用户任务程序0——级别6是最高。



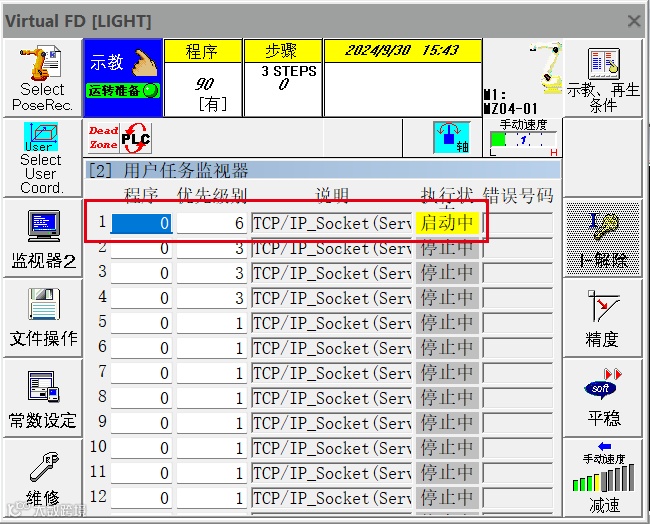
用户任务可以设定优先级别。优先级别可以从用户任务监视器分别设定任务编号 1~任务编号 4,通过设定优先级别,并通过用户任务的动作,可以使本控制装置的系统承载负荷和再生速度保持平衡。
优先级别可以设定 1(低)~6(高)的 6段优先级。由于优先级 1 对其他处理的影响小,如果对一般在后台运行的用户任务进行设定,可以减小对作业程序再生的影响。设定优先级 5 后,由于可以执行高速处理,因此在机器人等待计算处理结束后进行动作的情形,可以缩短周期时间。
负荷级别由 EXPERT 以上资格的操作人员将其显示在用户任务监视器上。在作业程序、用户任务再生的状态下,确认用户任务监视器,确认没有问题。
往期精彩回顾:
安川机器人仿真软件MotoSimEG_VRC2020安装教程和软件
安川机器人示教器按键界面认识
安川机器人指令扩展小技巧
安川机器人校原点
安川机器人仿真软件工具坐标的创建和使用
安川机器人外部IO启动
安川机器人仿真软件用户坐标的创建和使用
安川机器人快捷键自定义设置
安川机器人何谓伺服浮动功能(一)
安川YASKAW机器人工具坐标TCP设置方法。
KUKA机器人和基恩士视觉通讯文件详解
KUKA机器人WorkVisual软件如何新建程序
KUKA机器人夹抓取料前和放料前判断程序
KUKA机器人和基恩士视觉程序
KUKA机器人如何查看机器人和控制柜一一对应
KUKA机器人IO信号别名
KUKA机器人夹抓取料前和放料前判断程序
KUKA机器人workvisual常见故障
KUKA机器人外部轴直线导轨配置详解
库卡机器人输出信号断电保持功能如何设置
FANUC机器人如何设置报警故障严重度
安川机器人Motosim-vrc 连接机器人步骤
单击对应二维码,长按添加小编为好友▲
 东莞机器人之家
东莞机器人之家
