
想知道多更多资料请关注东莞机器人之家公众号。

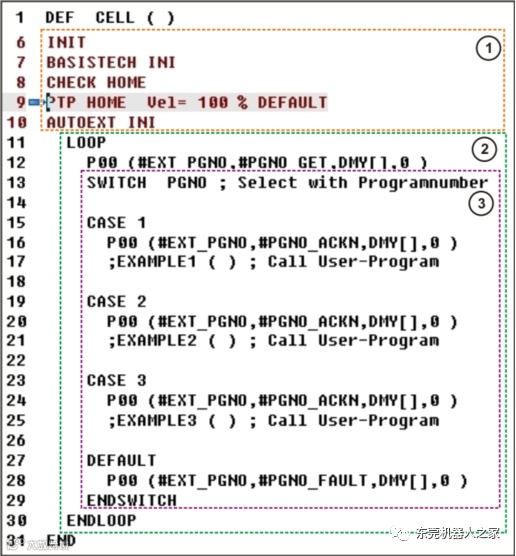
Cell 程序
1 初始化和 Home 位置
初始化基坐标参数
根据“Home” 位置检查机器人位置
初始化外部自动运行接口
2
无限循环:
通过模块“P00” 询问程序号
进入已经确定程序号的选择循环。
3 程序号的选择循环
根据程序号(保存在变量“PGNO” 中)跳转至相应的分支
(“CASE”) 中。
记录在分支中的机器人程序即被运行。
无效的程序号会导致程序跳转至“ 默认的” 分支中。
运行成功结束后会自动重复这一循环。


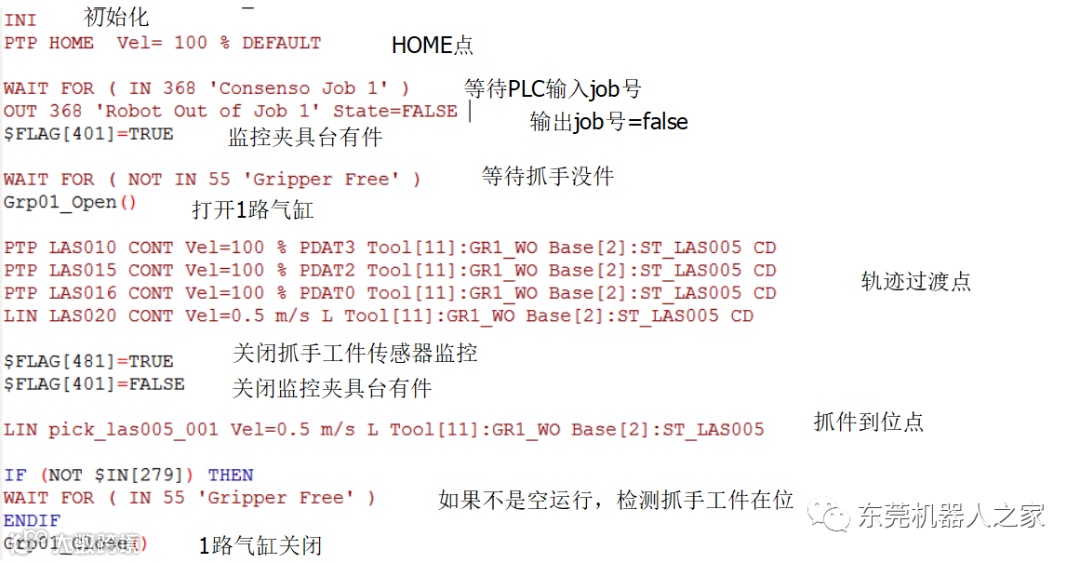







抓手气缸状态监控程序
JOB/REQUEST监控程序
工件在位输出点程序
气缸打开关闭程序
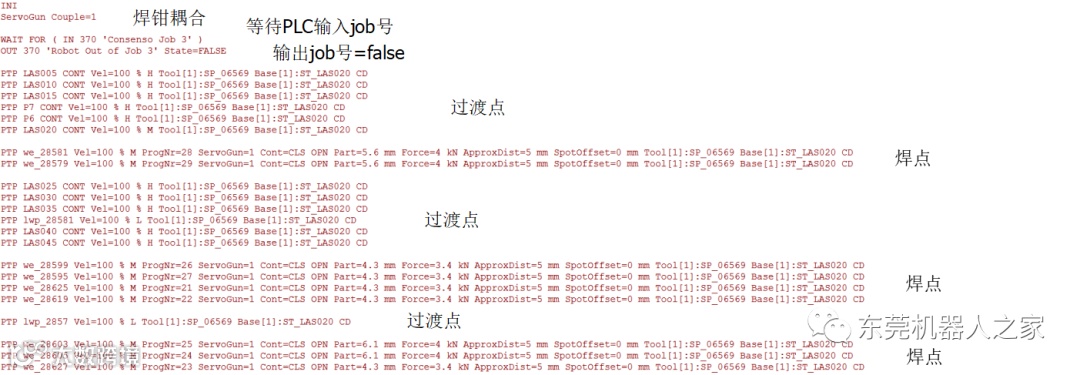
工件监控程序
焊接监控程序
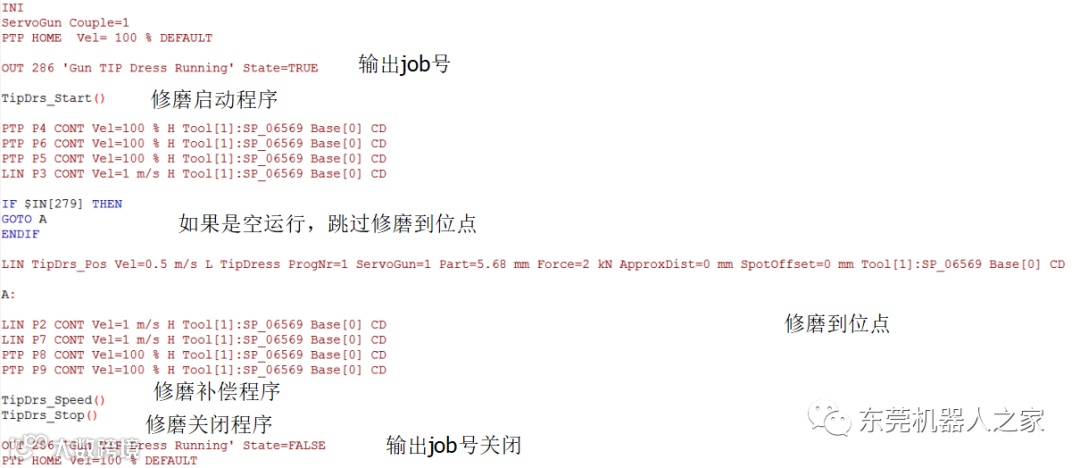
工具监控程序