
FANUC机器人软浮动功能
机器人朝着通常示教的目标位置正确地进行操作。
因此,在将工件安装在机床上进行作业的情况下,由于工件的精度偏差,与机床之间的相对位置会出现偏移,由此而可能导致工件与机床相互干涉。在将精度上有偏差的工件安装到机床上时,软浮动功能将十分有效。
此外,在与液压引起的挤出同步地取出工件而同步速度不稳定的情形,以及粗削工件等希望准确地进行机器人无法抓取的工件搬运的情况下,软浮动功能也同样十分有效。
关节/直角软浮动功能执行如下操作:
支持的软浮动有关节软浮动和直角软浮动,关节软浮动指定与机器人各手臂的回转方向相关的柔度,而直角软浮动则沿着直角轴方向指定柔度。
通过程序上的指令来指定本功能的启用/禁用、以及条件。
可以针对每个轴指定“伺服柔度”。“伺服柔度”,是指该轴抵抗外力的强度。
可在0%~100%的范围内指定,100%表示柔度最佳的状态。
“伺服柔度”,由将1组(9个轴)的数据汇总起来的条件表来指定。
机器人上被施加某一定值(抗御静摩擦力的程度)以上的外力时,机器人的轴在该外力的推动下运动。
机器人上被施加有外力的情况下,机器人不会到达示教点。此时的示教点和到达点之间的距离,几乎与外力的大小成比例。
施加有静载荷(如:重力)的情况下,机器人将自动控制力,即使软浮动功能处在有效状态,也会保持机器人的姿势。
下面,关节/直角软浮动功能的详细内容。
程序指令语句
作为与关节/直角软浮动功能相关的程序中的指令语句,备有如下 3个。
SOFTFLOAT [n] (软浮动[n])该指令使用条件n 的数据而使软浮动功能启用。
软浮动条件的设定,在后述的“条件设定画面”上进行。
SOFTFLOAT END (软浮动结束)
该指令使得软浮动功能禁用。
FOLLOW UP (跟踪)
通常,如果没有外力,机器人就会返回到示教点,而在执行该指令的情况下,将当前
位置视为示教点,机器人即使在外力丢失的情况下也不会返回示教点。
-软浮动功能的启用区间
SOFTFLOAT [n] 指令,有两种使用方法:在程序内单独示教、和在动作指令后作为动作附加指令示教。
在机器人动作中软浮动功能启用的区间,由该指令语句的示教形态等来确定。
单独指令
SOFTFLOAT [n] 指令被单独示教前的一行的动作结束后,软浮动功能启用。
下面的例子中,在第1 行的动作结束后,软浮动功能启用,并因第5行的 SOFTFLOAT END 指
令而被禁用。
1: JP [1] 100%FINE
2: SOFTFLOAT [1]
3: LP [2] 100mm/sec FINE
4: LP [3] 100mm/sec FINE
5: SOFTFLOAT END
动作附加指令
软浮动功能在附加有SOFTFLOAT [n] 指令的动作指令的执行途中启用。
软浮动功能在动作途中的哪个阶段启用,由软浮动条件的“软浮动开始比率”来确定。
动作附加指令,由到达该位置(附加有SOFTFLOAT [n] 指令的动作指令的示教点)之前的移动距离的比率(0%~100%, 1%刻度)来指定。
下例中,软浮动功能在第1 行的动作指令的示教点 P [1] 、和附加有SOFTFLOAT [n] 指令的第2行的动作指令的示教点 P [2] 之间启用。
1: JP [1] 100%FINE
2: LP [2] 100mm/sec FINE SOFTFLOAT [1]
3: L P [3] 100mm/sec FINE
4: SOFTFLOAT END

注释:直角软浮动不支持动作附加指令。
-条件设定画面
软浮动条件的设定,在[设置/SOFTFLOAT] 画面上进行。
该画面由如下2 个画面构成(一览画面和详细画面)。
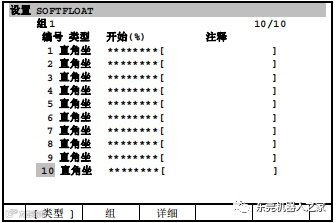
一览画面
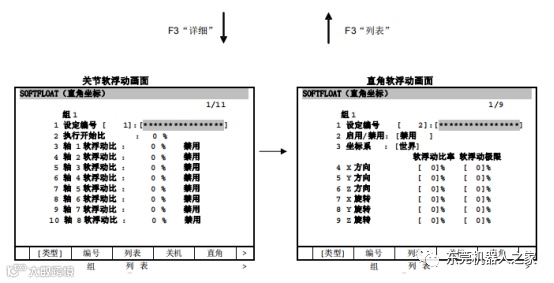
详细画面
一览画面和详细画面的切换,通过功能键进行。
按下一览画面的F3“详细”键一进入详细画面
按下详细画面的F3“列表”键一进入一览画面
软浮动条件在标准情况下至多可以设定10个。
详细画面上可以设定如下数据。
设定项目 |
说明 |
设定编号/注解 |
软浮动条件的设定号码。默认情况下可设定10个。将光标指向第 1行后按下 ENTER (输入)键,即可输入注释。注释字符串的输入方法与其他画面相同。 |
执行开始比 |
第 2 行,指定将SOFTFLOAT [n] 指令作为动作附加指令进行示教情形下的、软浮动功能启用的位置。有关执行开始比率,请参阅“软浮动功能的启用区间”。 |
轴软浮动比 |
在第3 行以后的行,对每个轴指定“伺服柔度”。 “伺服柔度”, 是指该轴抵抗外力的强度。 可在 0%~100%的范围内指定,0%表示最坚硬的状态,100%表示最柔软的状态。 在第 3 行以后的行,对每个轴指定软浮动功能的启用/禁用。 将光标指向各行的最右边(启用/禁用设定位置), 显示功能键 F4"启用”和 F5禁用”, 使用这些功能键来设定启用/禁用。 注释 按下F2编号”, 即可移到其他条件号码的详细画面。 |
启用/禁用 |
设定为“禁用”时,不会执行软浮动。 |
坐标系 |
选择“世界”、“用户”、“工具”。 注释使用了远程TCP的情况下,“用户”是指远程TCP 上的坐标系。 |
X方向等 |
设定 X, Y, Z 轴方向、轴周围的柔度。调大“软浮动比率”时,弹簧常数变小,即可以更小的力来移动机器人。调大“软浮动极限”, 在该方向机器人所施加的力或力矩的最大值变小,即可以更小的力来移动机器人。“软浮动比率”和“软浮动极限”之间的区别如下所示。
|

动作范围限制的设定
可限制直角软浮动执行中的动作范围。
根据软浮动条件所指定的坐标上的TCP 指令位置和实际位置的差若超出允许值,将会发出报警而停止。
为了安全目的,在运行执行直角软浮动的程序之前,为了避免干扰周围,请预设以下的系统变量。
系统变量的反映需重新接通电源。
Sparam_group [g].Scb_mass =1. 0: 将动作范围限制设为有效。
Sparam_grouplg] .Scb_ix=X方向允许值[mm] (若为允许值0.0,始终发出报警)。
Sparam_grouplg] .Scb_iy=Y方向允许值[mm] (若为允许值0.0,始终发出报警)。
Sparam_grouplg] .Scb_iz =Z方向允许值[mm] (若为允许值0.0,始终发出报警)。
以上资料参考文献FANUC机器人手册。
▼东莞机器人之家,关注有惊喜 ▼
小编微信☜
公众号二维码☞
单击对应二维码,长按添加小编为好友▲
关注公众号,回复“888”
国内外多款机器人 / 主流PLC 等
近300G精品资料,任你下载!
内容来源:东莞机器人之家
整理编辑:东莞机器人之家,个人微信号:Robot_Xin(欢迎添加)
部分图片来源于网络,如有侵权请告知
如需转载,请注明以上内容


