
一个外部输入信号突然变为0或1。
一个设定的时间到达后。
机器人到达某一个指定位置。
当机器人发生某一个错误时。
当中断发生时,正在执行的机器人程序会被停止,相应的中断程序会被执行,当中断程序执行完毕后,机器人将回到原来被停止的程序继续执行。
常用的中断相关指令简介如下:①
|
|
指 令 注 释 |
CONNECT |
中断连接指令,连接变量和中断程序 |
ISignalDI |
数字输入信号中断触发指令 |
ISignalDO |
数字输出信号中断触发指令 |
ISignalGI |
组合输入信号中断触发指令 |
ISignalGO |
组合输出信号中断触发指令 |
IDelete |
删除中断连接指令 |
ISleep |
中断休眠指令 |
IWatch |
中断监控指令,与休眠指令配合使用 |
IEnable |
中断生效指令 |
IDisable |
中断失效指令,与生效指令配合使用 |





MODULE Module1
VAR intnum intno1:=0; !定义中断数据intno1。
VAR bool bLoadingOK:=FALSE; !定义bLoadingOK布尔量BOOL。
!***********************************************************
PROC main()
IDelete intno1; ; !取消当前中断符intno1的连接,预防误触发。
CONNECT intno1 WITH trap1; !将中断符与中断程序tTrap连接。
ISignalDI di8LoadingOk, 1, intno1; !定义触发条件,即当数字输入信号di8LoadingOk为1时,触发该中断程序。
ENDPROC
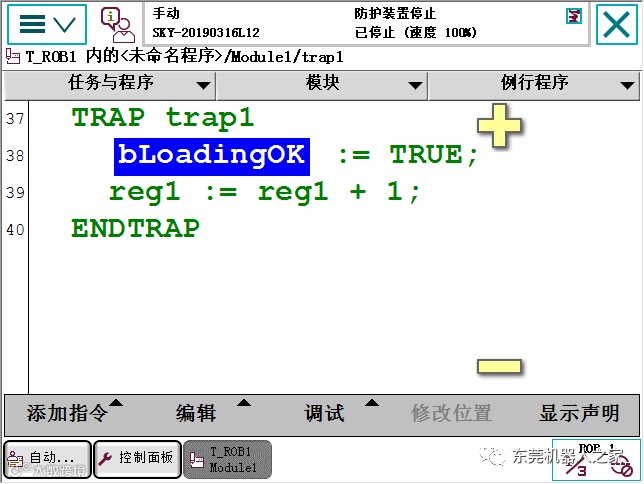
TRAP trap1
bLoadingOK := TRUE; !bLoadingOK布尔量赋值为TRUE
reg1 := reg1 + 1; !reg1自加1。
ENDTRAP
ENDMODULE
注若在ISignalDI后面加上可选参变量\Single,则该中断只会在di1信号第一次置1时触发相应的中断程序,后续则不再继续触发。
▼东莞机器人之家,关注有惊喜 ▼
小编微信☜
公众号二维码☞

