
系统数据类型是KUKA机器人系统运行的变量,用来保持系统的正常运行。
(1)声明:系统数据类型无需进行声明,直接进行使用有效性/生存期:系统变量是全局变量,长期有效和存在,可随时查看当前的值。
下面以$MODE OP(机器人运行方式)$DATE(当前时间和日期),$POS_ACT(当前机器人位置)进行举例说明:
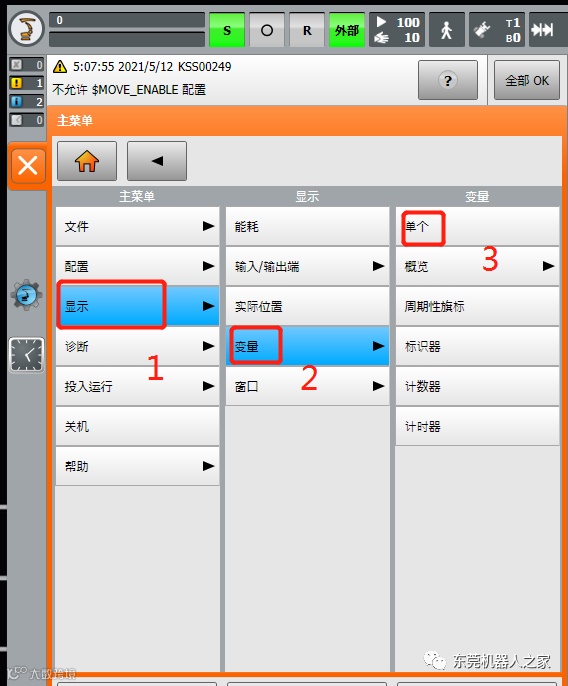
1.显示——2.变量——3.单个。
4.$MODE OP(机器人运行方式)——5.更新。

6.$DATE(当前时间和日期)——7.更新。

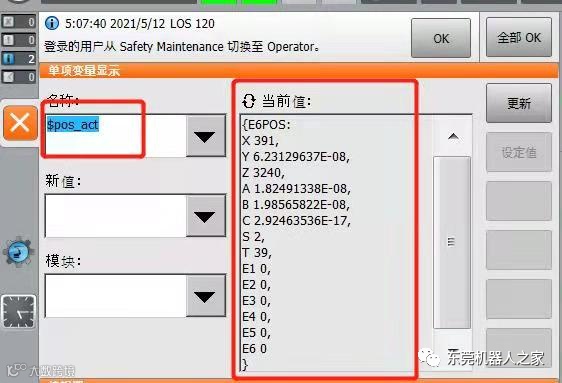
8.$POS_ACT(当前机器人位置)——9.更新。
DEF TESTXXF1()
DECL INT REG1
DECL E6POS PNOWPOS
INI
REG1=0
LOOP
IF SMODE_OP ==#T1 THEN
REG1=REG1+1
HALT
ENDIF
PTP P10 Ve1==80%PDAT1 Too1[1]:tGripper1
XPNOWPOS=$POS_ACT
LIN XPNOWPOS
$date={day 12,month 5,year 2021}
ENDLOOP
END