
公众号《东莞机器人之家》和《电气自动化之家》——工业机器人前沿资讯、学习资料。欢迎关注订阅转发和分享!
采用第三方三维软件SolidWorks预先制作成相应的文字和笔模型,成功保存为SAT格式后,导入到RobotStudio软件中。


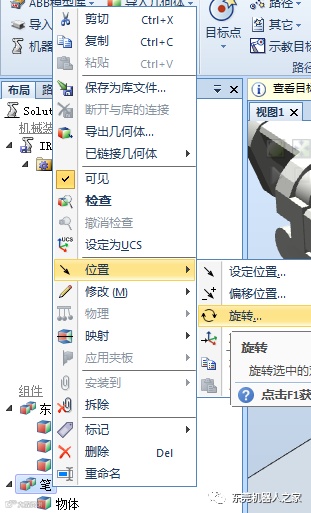




然后通过“位置——旋转——X轴90度”、“修改——设定本地原点”的方式,再把笔创建工具安装到机器人上面(创建工具方法可以参考前面的文章,在这不再赘述)。
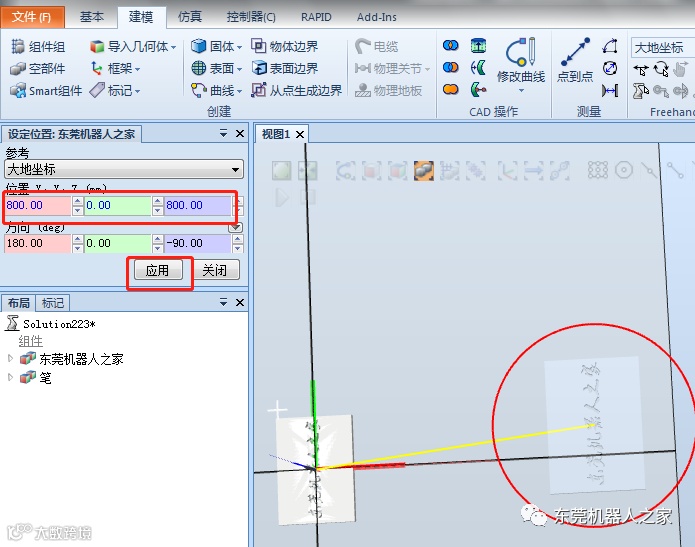
2.文字模版的导入如下。
经过合适调整将文字模型置于“轨迹编程模块”的适当位置。



在“基本”选项卡中选择“路径”下的“自动路径”,弹出自动路径设置框,且上面所选择的曲线自动显示在拾取边线的框中。

点开“选择平面”,参照面选择文字所在的平面,“开始偏移量”和“结束偏移量”均不作设置,近似值参数选择“线性”,最小距离选择“1mm”,公差选择“1mm”,然后设置指令的结构,将其设置为“MOVEL * V200 fine Tooldate_1 \Wobj:=Workobject_1”。
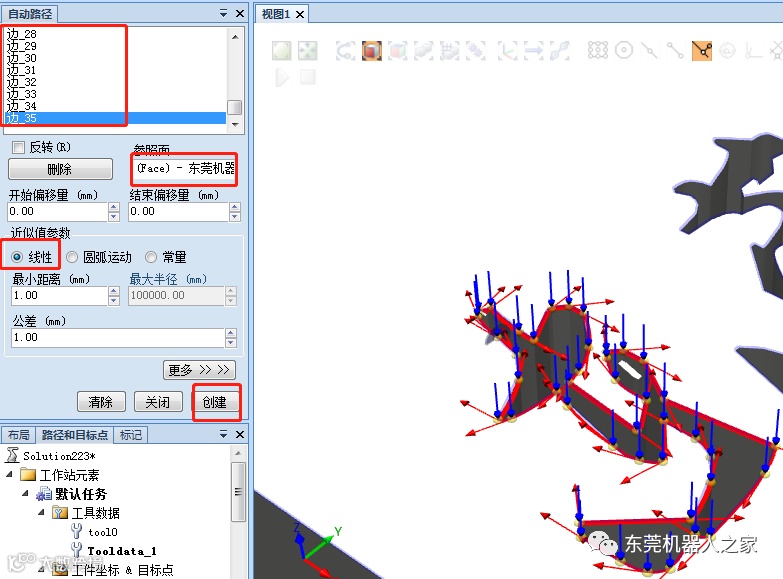
然后点击“创建”按钮,自动生成机器人的路径Path_10。按照上面的操作,完成文字其他部分的路径生成。

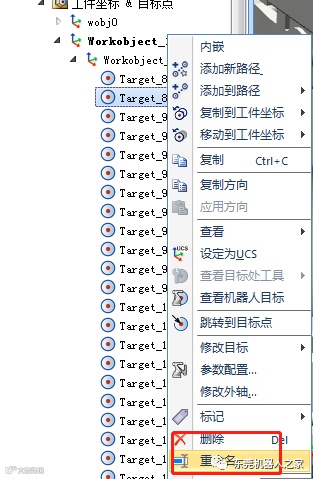
机器人目标点调整
查看自动生成的各个目标点,并进行调整,在调整目标点姿态过程中,为了便于查看工具在此姿态下的效果,可以将此处目标点的工具显示出来
在上述目标点处,若想更改此处的姿态,可右击目标点,选择“修改目标”菜单下的“旋转”选项。同时,可通过Shift及左键,选中剩余的所有目标点,然后统一进行调整。
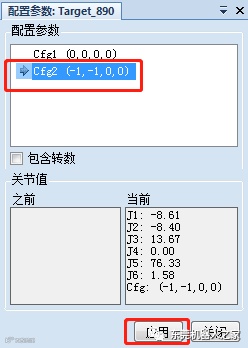
轴配置参数调整












往期精彩回顾:
▼东莞机器人之家,关注有惊喜
▼

小编微信☜
公众号二维码☞

