
ABB机器人快速画地球仪程序如下:

MODULE Module1
VAR num R:=0;
CONST robtarget p10:=[[1054.53,0,1013.33],[0.0174524,0,-0.999848,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
VAR robtarget p20:=[[1054.53,0.00,1013.33],[0.0174524,0,-0.999848,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
VAR robtarget p30:=[[1054.53,0,1013.33],[0.0174524,0,-0.999848,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
VAR robtarget p40:=[[1054.53,0.00,1013.33],[0.0174524,0,-0.999848,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p60:=[[1054.53,0.00,1013.33],[0.0174524,0,-0.999848,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p50:=[[1054.53,0.00,1013.33],[0.0174524,0,-0.999848,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
!***********************************************************
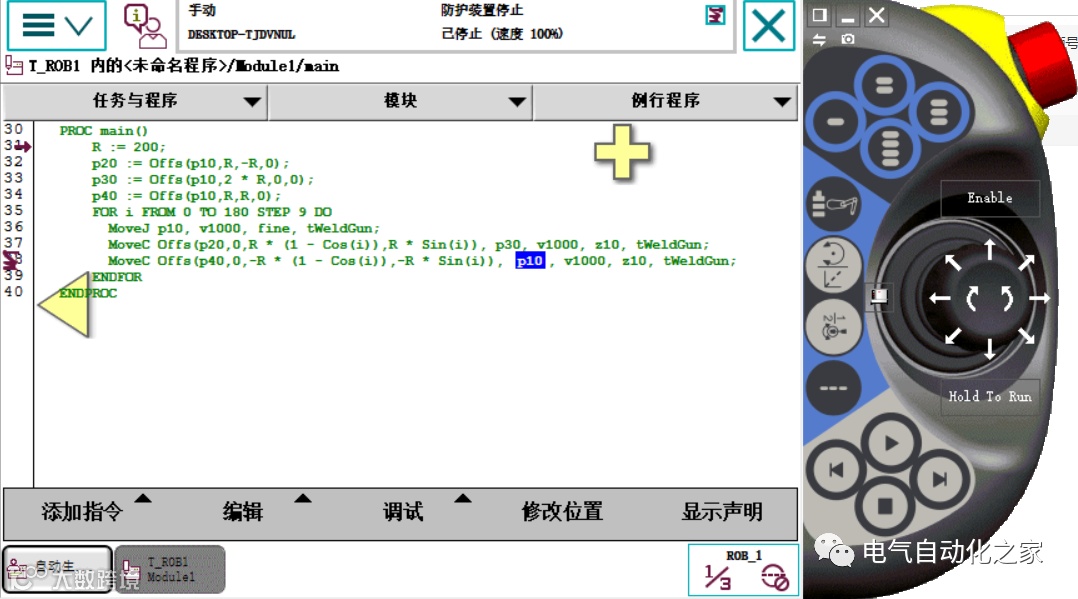
PROC main()
R := 200;
p20 := Offs(p10,R,-R,0);
p30 := Offs(p10,2 * R,0,0);
p40 := Offs(p10,R,R,0);
FOR i FROM 0 TO 180 STEP 9 DO
MoveJ p10, v1000, fine, tWeldGun;
MoveC Offs(p20,0,R * (1 - Cos(i)),R * Sin(i)), p30, v1000, z10, tWeldGun;
MoveC Offs(p40,0,-R * (1 - Cos(i)),-R * Sin(i)), p10, v1000, z10, tWeldGun;
ENDFOR
ENDPROC
ENDMODULE
往期精彩回顾:
2.ABB机器人WAN网口同时使用socket及Profinet
3.西门子1200PLC和ABB机器人Profinet通迅GSD文件添加方法
4.KUKA机器人和西门子PLC profinet 通讯快速获得GSDML文件方法
6.ABB机器人WorldZone安全区域功能输出HOME作业原点信号
10.安川机器人指令扩展小技巧