



索引:
1、受挫超材料的非定向序和非交换响应
2、一种异质集成的氮化硅上铌酸锂光子平台
3、片上声子晶体中的拓扑网络传输
4、利用微观和宏观多孔性的无缝仿生软机器人
5、大体积软组织工程中高性能PCL负泊松比植入物3D打印
1
从原子晶体到动物群,自然界中序的出现被自发对称性破缺的概念所捕获。然而,当破缺的对称相位受到几何约束时,这一物理学基础就受到了挑战。这种挫折决定了各种系统的行为,如自旋冰、受限的胶体悬浮液和皱巴巴的纸张。这些体系典型地表现出强烈的简并和非均相基态,因此逃脱了金兹堡-朗道相序范式。
近日,阿姆斯特丹大学的Xiaofei Guo和Corentin Coulais教授联合里昂大学Denis Bartolo教授和David Carpentier教授,结合实验、模拟和理论,发现了一种意想不到的拓扑序形式:非定向序。研究人员通过设计全局受挫的超材料来证明这一概念,这些超材料可以自发地打破离散的Z2对称性,可以观察到它们的平衡必然是异质的和广泛退化的。研究人员通过将弹性理论推广到非定向有序参数束来解释这一观察结果。由于拓扑保护节点和线的任意位置导致非定向平衡点广泛退化,其中序参数必须消失。该研究进一步表明,非定向序更广泛地适用于本身不可定向的物体,如弯曲的Möbius条和克莱因瓶。最后,通过将时间相关的局部扰动应用于具有非定向顺序的超材料,研究人员设计了拓扑保护的机械记忆,实现了非交换响应,并表明它们带有载荷轨迹编织的印记。除了力学之外,在胶体科学、光子学、磁学和原子物理学等不同领域,非定向性可以作为一种强大的超材料设计原则,有效地跨尺度存储信息。(刘帅)
相关工作发表在《Nature》上。

文章链接:
https://doi.org/10.1038/s41586-023-06022-7
2
绝缘体上铌酸锂薄膜(LNOI)的出现和与之对应的半导体工艺的进步促进了完全集成的LiNbO3电光器件的发展。然而,到目前为止,LiNbO3光子集成电路大多是使用非标准蚀刻技术和部分蚀刻波导制备的,这意味着在硅光子学中缺乏可重复性。所以薄膜LiNbO3的广泛应用需要一个具有精确的光刻控制的可靠解决方案。
近日,瑞士联邦理工学院的Tobias J. Kippenberg教授团队展示了一个异质集成的LiNbO3光子平台,该平台利用薄膜LiNbO3与氮化硅(Si3N4)光子集成电路的晶片级键合,不仅保持了Si3N4波导的低传播损耗(<0.1 dB/cm)和高效的光纤到芯片耦合(<2.5 dB/ facet),并提供了无源Si3N4电路和电光元件之间的链接,绝热模式转换器的插入损耗低于0.1 dB。使用这种方法,作者演示了几个关键的应用,从而为复杂的LiNbO3集成光子电路提供了一个可扩展的,可代工的解决方案。相关工作发表在《Nature Communications》上。(郑江坡)

文章链接:
https://doi.org/10.1038/s41467-023-39047-7
3
边界态的拓扑输运不受缺陷和紊乱的影响,并受到体拓扑的保护。随着拓扑物理学的快速发展,电子波、电磁波、声波和拓扑弹性波的功能拓扑输运的发现令研究人员兴奋。例如,以谷陈数为特征的谷拓扑绝缘体具有丰富的谷相关输运。对于弹性波来说,拓扑输运在无损材料检测、高灵敏度传感和信息处理等领域具有重要意义。随着微加工技术的发展,在兆赫范围内实现操纵弹性波是完全可能的,在这个频率范围内可以实现片上传感和信息处理。因此,研究拓扑输运来设计具有鲁棒性和可操控性的拓扑材料弹性波器件是十分必要的。
近年来,扭曲双层石墨烯引起了人们的极大兴趣。随后,研究人员提出了一种在单层石墨烯中具有交错势的谷拓扑畴壁网络,作为探索拓扑网络传输的另一种方法。在扭曲双层石墨烯中,通过堆叠和扭曲石墨烯的薄片获得不同的畴。而在谷畴壁的网络中,不同的畴是直接由原始的谷相构成的。网络传输有两种类型:网络体态和网络边界态,这可以归因于超晶格效应,不能出现在原始晶格中。然而,由于原子尺度工程的困难,构建这些拓扑网络仍然是一个挑战,这些不寻常的网络体和边界态的确凿证据仍然难以捉摸。
近日,华南理工大学的邓伟胤、陆久阳、黄学勤教授团队和武汉大学刘正猷教授团队合作实现了基于网络单元格的片上声子晶体网络,该网络单元格具有六个通道,在硅衬底上以蜂窝阵列排列。在实验上直接可视化了原始声子晶体体态隙中的拓扑网络体输运和网络体态隙中的网络边界输运。这些结果为探索网络中的拓扑传输提供了一个可控的平台。相关工作发表在《PHYSICAL REVIEW B》上。(郑江坡)

文章链接:10.1103/PhysRevB.107.245122
4
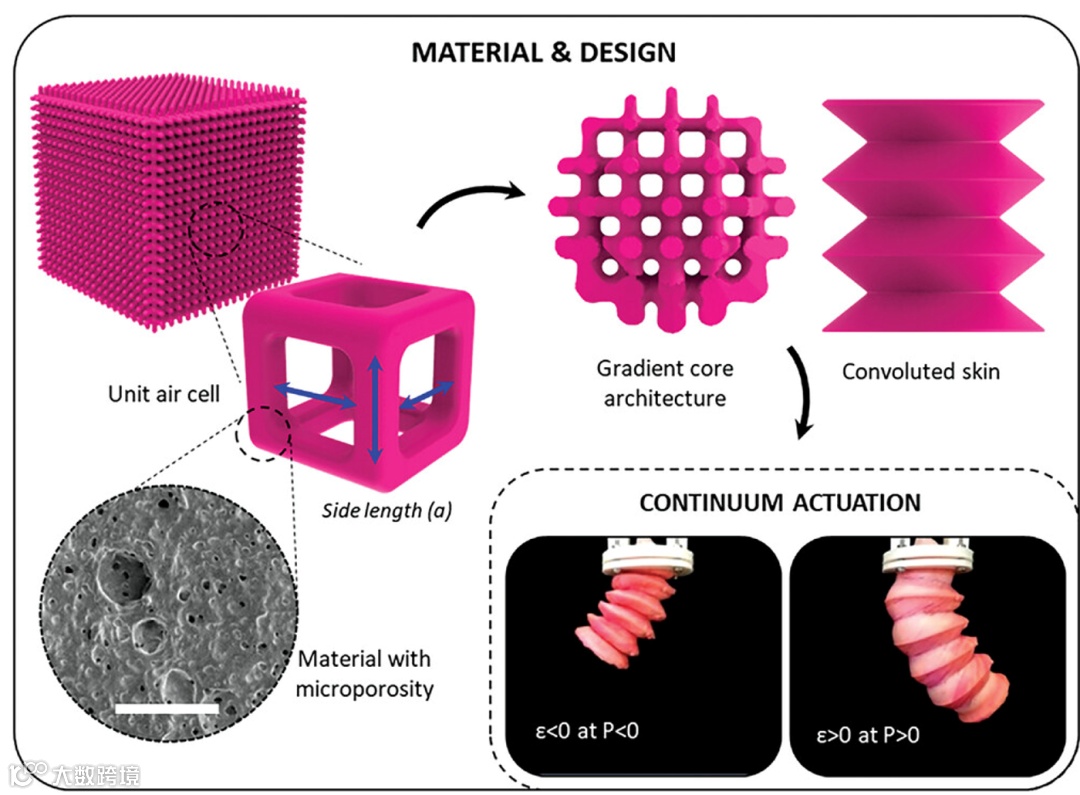
目前软机器人面临着一个主要挑战,即开发具有高度可变形和可靠驱动的软结构,这些结构在刚度上没有明显区别,主要根据所使用的材料和核心结构的设计来编程不同的运动。虽然先前的研究已经提出了一些方法来实现多维驱动器,如使用不同材料制成的软致动器,但不同功能的机械部件之间的接口并不光滑,从而限制了运动轨迹的实现、可重复性和可靠性。基于超材料的方法可以在整体结构中编程机械性能,但迄今为止,主要采用的是由3D打印材料制造的被动结构,这种结构只能实现单轴运动,没有编程的变形能力。因此,需要一种新的设计方法来实现可编程的多维运动。
近日,软体生物机器人感知技术研究所(IIT)的Seonggun Joe团队研究提出了一种新的软多维驱动设计方法,通过体积镶嵌结构和3D打印技术,创建了一种具有可编程的变形和平滑的刚度梯度的新型气动弹性晶格致动器(PELAs)。该方法使用了一种由油中水乳液组成的新型印刷组分,通过打印后形成高度可拉伸的聚合物连续相和相互连接的空气空隙的多孔结构。印刷驱动器的运动由总等效刚度决定,卷曲蒙皮改变了驱动器的被动结构,并提供了高双轴变形能力和结构稳定性。这种方法为实现多维运动和多功能性的软机器人开辟了新的途径,并具有潜力应用于多领域,如机器人技术、自动化生产和医疗领域等。相关成果以“Jointless Bioinspired Soft Robotics by Harnessing Micro and Macroporosity”为题发表在《Advanced Science》上。(孙嘉鹏)
文章链接:
https://doi.org/10.1002/advs.202302080
5
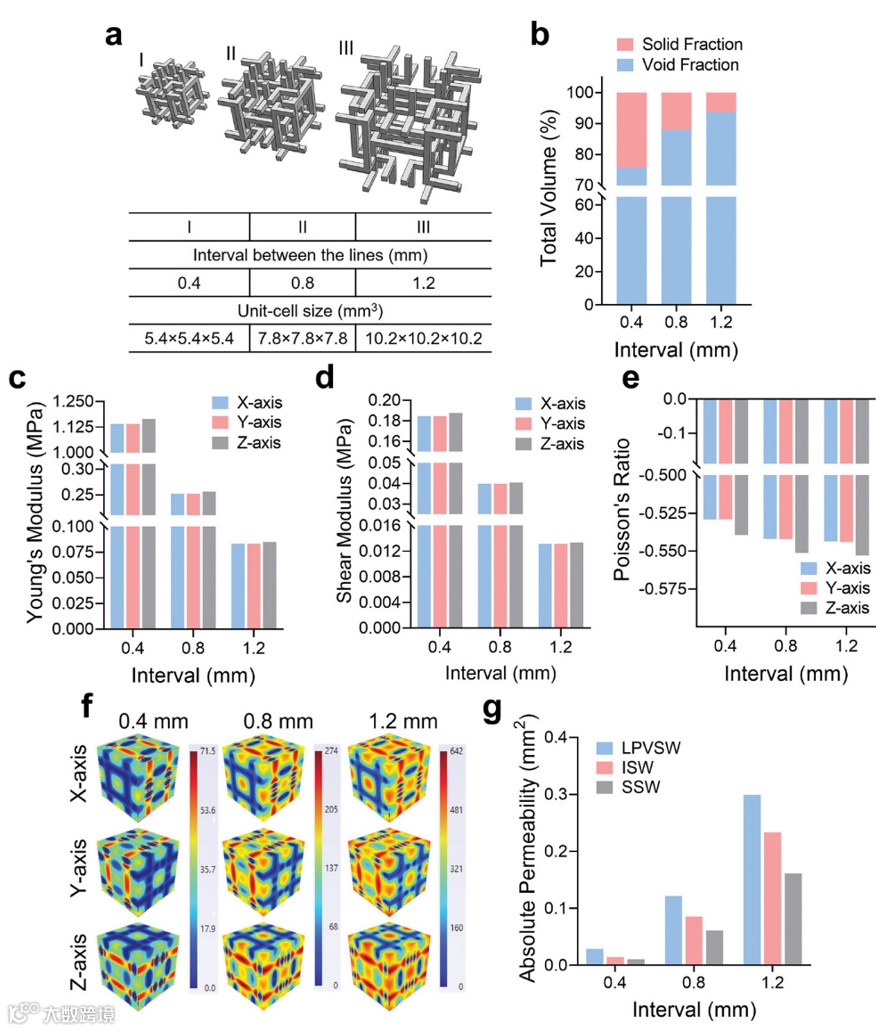
在过去的几年里,3D打印技术迅速推进了生物医学植入物领域,使个性化医疗设备和组织重建成为可能。3D打印可以根据病人的医疗数据,制作出几何形状适合复杂解剖缺陷的病人专用植入物。此外,它还能够实现独特的内部结构,以调节植入物的力学性能,使之与相关的原生组织相一致。针对3D植入体设计,人们提出了多种3D结构(如拉胀结构),在疾病诊断、医疗器械开发、组织工程等生物医学应用领域引起了极大的关注。拉胀材料在单轴变形下具有负的泊松比(PR)。这种反直觉的变形特性使拉胀结构具有先进的性能特征,如冲击能量吸收、抗压痕、同向曲率等。另外,由于它们的变形机制是通过网络中相交的节点的相对旋转来实现具有弹性(抗断裂)的高柔顺性。具有高空隙体积分数的结构化拉胀材料也可望具有增强的渗透性,有利于营养物质、氧气和代谢物的质量转移。这些能力为实现结构化拉胀材料开发用于大体积软组织工程的先进功能性3D植入物提供了理论基础。软组织具有复杂的特性,包括高柔韧性、弹性和非线性力学行为,这些特性在不同的生理条件下是不同的。尽管最近努力通过实施多孔结构来提高3D植入物的灵活性和顺应性,但由于在匹配软组织的复杂特性方面存在局限性,用于体积软组织重建的3D多孔植入物工程仍然面临巨大挑战。
近日,美国佐治亚理工学院Michael E. Davis和Scott J. Hollister团队报道了一种用于大体积软组织工程的新型3D结构拉胀材料的成功3D打印。通过有限元(FE)模拟分析了3D拉胀设计,并通过选择性激光烧结(SLS)的聚己内酯(PCL)进行了进一步深入的力学和生物学分析。尽管PCL是临床上认可的生物材料之一,但其缺点是具有相对刚性和线性的力学性能。因此,尽管使用PCL,仍然可以实现高的初始灵活性和对单轴压缩的非线性应力-应变响应。3D拉胀材料的高质输运性能还表现在,在大尺寸的拉胀材料中,不仅有高的细胞存活率,还有细胞在充满细胞的水凝胶中的功能。3D拉胀材料的出色力学和生物性能是新型结构化拉胀材料设计与SLS固有的打印特性的协同效应的结果。目前的研究表明,基于SLS 3D打印的3D拉胀材料具有巨大的潜力,可以开发出临床上可行的3D植入物,用于重建大体积软组织。相关研究发表在《Advanced Functional Materials》上。(徐锐)
文章链接:
J. H. Park, H. J. Park, S. J. Tucker, et al. 3D Printing of Poly‐ε‐Caprolactone (PCL) Auxetic Implants with Advanced Performance for Large Volume Soft Tissue Engineering[J]. Advanced Functional Materials, 2023.
https://doi.org/10.1002/adfm.202215220
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理,所有来稿文责自负,两江仅作分享平台。转载请注明出处,如原创内容转载需授权,请联系下方微信号。
