


今天我们继续为大家带来本周的超材料前沿研究精选,内容涉及通过时空干扰交错装配实现的节能动态三维超表面,非阿贝尔能带奇异点和欧拉类拓扑的干涉测量,具有可重构电磁散射特性的多功能超构材料等,敬请期待!
索引:
1 通过时空干扰交错装配实现的节能动态三维超表面
2 非阿贝尔能带奇异点和欧拉类拓扑的干涉测量
3 时间多层的离散系统中任意维度非阿贝尔Aharonov - Bohm干涉
4 具有可重构电磁散射特性的多功能超构材料
5 扫描超快电子显微镜对InAs及GaAs皮秒载流子动力学的测量
将二维 (2D) 物质受控转化为复杂的三维 (3D) 结构,为各种新兴领域带来了希望,包括软机器人、生物医学设备、超材料和虚拟现实/增强现实应用。这些方法包括使用对外部刺激作出反应的响应材料,例如液晶弹性体、介电弹性体、可膨胀水凝胶和磁响应软材料。其他技术包括折纸/剪纸结构、软气动致动器、多材料结构以及在软基板上对预图案化 2D 条带进行机械屈曲。然而,这些方法通常在制造时预设形状变形规则,因此最终的 3D 形状通常是预先确定的,无法刷新。人们一直致力于实现可重新编程的 3D 结构,例如热激活机器人表面、洛伦兹力驱动机械超表面、加载路径控制机械组装,但代价是需要不间断的能量输入或可变形的 3D 几何形状有限。此外,这些可重新编程的变形结构通常缺乏有效的承载能力,这限制了它们在触觉设备中的实际应用,因为轻轻触摸可能会使变形结构塌陷。
近日,西湖大学的姜汉卿教授团队,受生物体自然变形能力的启发,引入了一种通过时空干扰交错装配来创建节能动态 3D 超表面的策略。该方法不同于依赖连续能量输入的传统变形技术,而是利用策略性干扰的纸基交错组件。通过在干扰软基板松弛期间快速改变其在各个空间点和时间阶段的刚度,能够形成具有理想承载能力的可更新、复杂的 3D 形状。此过程不需要持续消耗能量,可确保节能和持久的形状显示。该理论模型将屈曲变形与残余预应变联系起来,为一系列交错组件的逆向设计过程提供了支持,有助于创建各种 3D 配置。这种超表面在触觉显示方面具有显著的潜力,特别是对于视障人士而言,它预示着视障教育、触觉反馈和虚拟/增强现实应用方面的可能性。相关工作发表在《Nature Communications》上。(刘帅)

文章链接:
https://doi.org/10.1038/s41467-024-51865-x
2 非阿贝尔能带奇异点和欧拉类拓扑的干涉测量
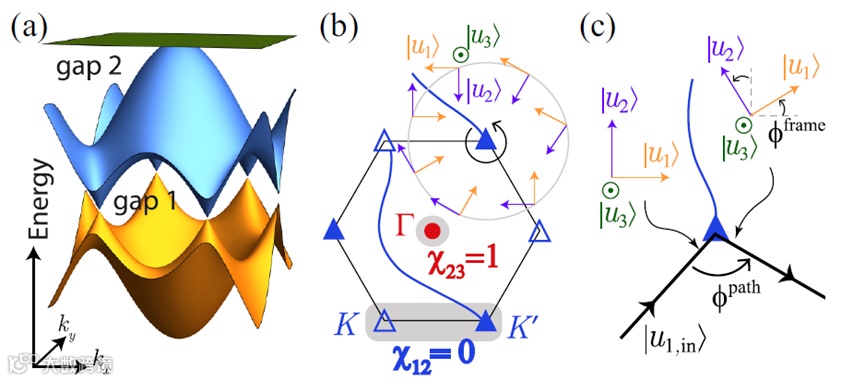
最近,多间隙拓扑相的研究取得了新进展,其中能带子空间(孤立能带集)可以获得非平凡不变量,这些不变量先验地不依赖于高对称点处能带的对称特征值,因此不属于迄今为止已知的所有分类。当系统由于 C2T 或 PT对称性的存在而可以用实值哈密顿量表示时,能带简并可以携带非阿贝尔框架电荷。能带节点在单间隙拓扑相中也起着重要作用。Weyl 节点充当 Berry 通量的来源,而高阶简并需要稳定晶体对称性,并且通常与拓扑不变量有关。单独的,它们的属性可以在不同的实验中探测。当提升到多间隙拓扑时,能带奇点获得的标志是非阿贝尔框架电荷,它可以诱导非平凡的欧拉类。因此,一个基本问题出现了:是否存在这些非阿贝尔电荷、它们的编织和这个不变量的可观察特征。
近日,剑桥大学的F. Nur Ünal教授团队,从理论上构建了两种具体方法,以实验性地探测超冷原子系统中的这些非阿贝尔编织过程和电荷。作者考虑两个能带的相干叠加,这可以通过在动量空间中以某个角度将原子移动到能带奇点来创建。通过分析激发对框架电荷的依赖性,作者展示了一种通过两个能带节点的干涉测量方案,该方案揭示了相对的框架电荷并允许测量多间隙拓扑不变量。第二种方法依赖于单个波包按顺序探测两个节点,其中框架电荷可以根据能带群确定。该结果为测量能带节点的非阿贝尔电荷和直接实验验证编织程序提供了一种可行的途径,可应用于各种环境,包括最近发现的在周期性驱动下出现的异常非阿贝尔相。相关工作发表在《Physical Review Letters》上。(刘帅)
文章链接:
https://doi.org/10.1103/PhysRevLett.133.093404
3 时间多层的离散系统中任意维度非阿贝尔Aharonov - Bohm干涉
系统的材料属性在时间上突然变化和空间上均匀变化,其时间尺度与电磁波的周期相当时,就会产生时间界面(TI)。与空间边界不同,该系统在 TI 处保持平移对称性,而打破时间反转对称性,从而为探索控制波的新颖散射特征提供了有趣的机会。如果多个TI按顺序排列,可以构建时间多层结构,并实现各种有前景的应用,包括时间瞄准、抗反射时间涂层、频率转换等。类似于连续电磁系统,离散系统中通过突然改变晶格配置可以引入TI。通过在这些离散系统中使用多个 TI也可以实现很多新颖的现象,例如可调谐时间隐形、时间波束编码器和时间干扰。因此,级联 TI 为探索离散系统中的新电磁现象提供了独特的机会。另一方面,阿哈罗诺夫-玻姆 (AB) 干涉可以为规范场的物理结果提供关键验证,是长期存在的重要研究课题。最近,人们对于在合成非阿贝尔规范场中探索新现象越来越感兴趣,由此产生了非阿贝尔AB干扰,成为非阿贝尔效应对拓扑量子计算很重要的一个例子。找到一种灵活的方法来构造非阿贝尔 AB 干涉并将这种效应推向更高维的规范场情况是至关重要的。显然,TI 在电磁系统中的运行具有完成此类任务的潜力。
近日,上海交通大学的袁璐琦副教授团队通过在离散紧束缚模型中引入级联 TI,利用时间多层结构来解决这个问题。探索了简并态的时间干涉,并使用两种类型的 TI 构造将其进一步发展为时间非阿贝尔规范场下的 AB 干涉。这种非阿贝尔规范场可以通过利用 TI 操作产生的时间简并态干扰来实现。 SU(2) 和 SU(3) 非阿贝尔规范场均经过理论研究并通过模拟进行验证,有可能扩展到 SU(N) 规范场。该工作表明,非交换运算可以在时间多层结构中实现,这进一步增强了时间调制系统对波的操纵能力。此外,所提出的非阿贝尔AB干涉方法能够扩展到更高维规范场,因此提供了一种研究高维非阿贝尔干涉的方法在时域中测量与场相关的物理现象。相关内容发表于《Nature Communications》上。(金梦成)

文章链接:
https://doi.org/10.1038/s41467-024-51712-z
4 具有可重构电磁散射特性的多功能超构材料
随着雷达探测技术的不断发展,战场武器的生存能力日益受到制约,隐身技术在现代战争中的重要性日益凸显。采用吸波材料可以有效降低雷达截面积,实现隐身性能。目前,高分子材料正逐步向宽频化、多功能化、可调化方向发展。特别是光学透明多功能超构材料和低红外发射多功能超构材料等多功能超构材料的开发可以满足不同的使用场景。这些技术还能重建雷达散射特性,从而实现伪装,然而,这方面的研究仍相对有限。超构材料中常见的可调性形式可分为四个主要方面:块状元件、材料特性调节、微流体通道和机械可重构结构。在材料特性调节方面,使用对外界刺激敏感的材料,如相变材料和石墨烯。然而,这种方法需要严格的环境控制,而且容易受到其他因素的干扰。微流体通道也是在固体介质中制备微通道,注入不同的流体介质,改变等效电磁参数,实现性能调节。然而,这种技术并不成熟,生产成本高,控制精度相对较差。机械可重构结构的方法通过改变几何构造、单元的相对位置或单元与底板之间的距离来改变结构的特定激励频率,从而调节多功能性能。与其他可调方法相比,这种方法更容易实现,并且可以在较宽的频率范围内实现调节。
近日,南京理工大学廖文和教授和李大伟教授团队提出了一种基于双稳态曲梁的具有可重构电磁散射特性的新型多功能超构材料。除了具有曲梁的缓冲和能量吸收特性外,该超构材料在2.17-17.31 GHz频率范围内实现了90%以上的电磁吸收,而相对厚度仅为0.09 λL。这种超构材料的双稳态特性允许它在不同的状态之间切换。此外,结合数字编码,该超构材料可以连续调节吸收带宽,进一步提高特定频段范围内的电磁吸收率。如果应用于卫星上,所开发的超构材料显着减少了雷达横截面,并提供了重新配置电磁散射特性的潜在应用。通过主动控制和重构特定频率点的电磁散射特性,实现伪装,为今后电子战对抗和防御应用提供了新的考虑视角。相关研究发表在《Advanced Materials》上。(徐锐)

文章链接:
G. Wang, D. Li, W. Liao, et al. Multifunctional Metamaterial with Reconfigurable Electromagnetic Scattering Properties for Advanced Stealth and Adaptive Applications[J]. Advanced Materials, 2024.
https://doi.org/10.1002/adma.202408216
5 扫描超快电子显微镜对InAs及GaAs皮秒载流子动力学的测量
Ⅲ-Ⅴ族半导体是超快、超小型光电子器件设计的重要材料,其载流子激发、传输和复合的性质决定了器件在光伏、光电子学等应用中的可行性,例如Ⅲ-Ⅴ族多结光伏电池的性能取决于光致载流子的寿命、扩散长度以及电荷分离效率,半导体快速光电探测器依赖于高效的电荷分离以及高载流子迁移率,场效应器件的调节范围受到表面态的限制等。这些器件的性能由纳米尺度的结构决定,而器件材料的载流子动力学发生在超快(亚皮秒)尺度上。由于半导体中的载流子密度和表面陷阱态随着尺寸或者固体的界面、局域无序、表面态等发生显著的变化,时空联合表征能更好的理解半导体器件的性质,从而为光学和电子设备的设计提供理论指导。然而,获得半导体光激发载流子的时空演变是一个相当大的挑战,一般超快光学手段空间分辨率受制于光学衍射极限,而扫描电子显微镜的时间分辨率低于很多高速器件的要求。
近日,美国桑迪亚国家实验室的Suhas Kumar教授团队利用扫描超快电子显微镜(SUEM),结合了纳米级空间分辨率和皮秒量级的时间分辨率,在体块n型GaAs和p型InAs中,测量到了皮秒载流子动力学以及三个相关量:亚表面能带弯曲、表面上真空势以及表面陷阱密度。该工作指出,SUEM的衬度机制不仅包括光诱导的亚表面能带弯曲效应,还包括真空场效应,泵浦探测在负时间段内呈现的信号证明了相对较慢的二次电子(SE)与真空场效应之间的相互作用。同时,该工作首次获得了体块p型InAs中的表面态密度和载流子动力学。丰富的表面缺陷态和局部表面势在SUEM中信号的主导地位表明表面缺陷(或陷阱)控制了材料的表面势。而两种材料在掺杂浓度和表面态差异明显的情况下,光致载流子饱和呈现相似的时间尺度(约100皮秒)。该发现进一步为GaAs和InAs器件的单次高带宽和多脉冲应用的载流子传输极限提供了指导,也凸显了SUEM方法在非接触性地测量具有表面灵敏度的载流子动力学方面强大的作用。相关内容发表于《Science Advances》上。(赵泓远)

文章链接:
https://doi.org/10.1126/sciadv.adn8980
6 快速响应、高速起飞的双稳态跳跃机器人
从昆虫到鱼类,许多生物都利用跳跃作为运动、捕食或躲避天敌的手段。与爬行或滚动等其他运动方式不同,跳跃已被证明具有高效率和对复杂地形的适应性,并且在小型化机器人领域的潜在应用受到了极大的关注。近年来,采用具有大弹性变形、高抗冲击性、耐用和机械坚固功能的跳跃机器人取得了进展。其中包括一系列基于各种驱动方法的软跳跃机器人,包括介电弹性体、液晶弹性体、燃烧和软流体驱动器。然而,现有的软跳跃机器人在跳跃能力上仍无法与自然生物竞争。由于软材料的低模量和柔顺性,设计出既具有优异跳跃性能又具有高柔韧性的软机器人仍然是一项挑战,特别是在小尺度下。跳跃过程中对高功率输出的要求是一个难点,大多数软机器人的驱动力来自于刺激源,因为刺激源直接驱动软材料,使其模仿自然界中肌肉的收缩和松弛。此外,机器人跳跃机构的设计以实现快速响应和短脉冲间隔时间的高效运动,也是一个挑战。
近日,浙江大学赵朋教授、张承谦助理研究员联合美国卡内基-梅隆大学Carmel Majidi教授报道了一种磁驱动的超快双稳态软跳跃机器人,与以前的软跳跃机器人相比,它具有良好的跳跃能力(跳跃超过108个身体高度,起飞速度超过2米/秒)和快速的响应时间(小于15毫秒)。双稳态之间的突弹跳变形成了一个可重复的回路,利用了储存的弹性势能的超快释放。在动力学分析的基础上,实现了双稳态软跳井的多模态运动:井间跳跃模式和井内跳跃模式。通过调节磁场的持续时间和强度来控制这些模式,使双稳态软跳跃机器人具有强大的运动能力。此外,它能够以可调的高度和距离全方位跳跃。为了验证其在复杂环境下的性能,建立了一个具有两栖地形的真实管道。跳跃机器人成功地完成了通过管道清洗水的模拟任务。双稳软跳跃机器人的设计原理和作动机构可进一步推广应用于其他柔性系统。相关研究发表在《Science Robotics》上。(徐锐)

文章链接:
D. Tang, C. Zhang, C. Pan, et al. Bistable soft jumper capable of fast response and high takeoff velocity[J]. Science Robotics, 2025, 9: eadm8484.
https://www.science.org/doi/10.1126/scirobotics.adm8484
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理,所有来稿文责自负,两江仅作分享平台。转载请注明出处,如原创内容转载需授权,请联系下方微信号。
