
车路协同中的边缘计算
车路协同中的“路”并不是真正的路,而是指在路侧部署的智能化感知设备,例如收集路况的摄像头、雷达;显示交通信息的信号灯、信息屏;与车辆进行通信的无线基站、网关,以及最核心的可汇总上述数据信息,并进行分析计算与指令下发的“边缘计算服务器”。
边缘计算可以将云端的计算负荷整合到边缘层,在边缘计算节点(ECN)完成绝大部分的计算,并通过LTE-V/5G路侧单元(RSU)等传输手段,实时将结果发送给装置车载单元(OBU)的车辆,满足车路协同的需要。
5G与V2X技术的不断融合对车路协同边缘计算的算力,提出了更高的要求。在路侧,激光雷达每秒最多可产生数百万个数据点,基于海量的原始数据,边缘计算设备需要实现对不同目标的识别与跟踪,提升车路协同系统的感知能力,为车辆决策控制系统提供实时准确的环境信息,保障智慧交通安全出行。
觉非科技:路侧多传感器融合感知和定位的边缘设备
在V2X场景中,部署于路侧的传感器和MEC边缘计算设备一般都是独立安装,每个传感器之间的相对位姿不容易测量和控制,难以做到精确标定,这对于最终传感器感知融合的结果精度造成了很大的影响。
为了最大限度提升路侧多传感器融合感知和定位的效果,觉非科技自主研发了一套集成不同传感器和高性能计算单元的一体化设备。
设备将激光雷达、工业相机、毫米波雷达和高算力计算单元集成于同一机体内,内部同时集成了一套基于FPGA实现的高精度同步授时板卡,为传感器和MEC提供高精度的触发授时。

图:觉非科技路侧多传感器融合一体化设备
一体化的刚性结构保证了各传感器之间的相对位姿,可以精确测量与标定。同时,传感器和MEC集成在同一结构内,减少了线缆长度,能够保证数据传输的稳定性,并降低延时。
为了解决高精度的授时系统对传感器授时同步的问题,觉非科技自研基于FPGA的高精度授时板卡,采用GPS对传感器和MEC进行同步授时,并输出高精度的脉冲信号对激光雷达和工业相机进行数据同步,整个系统的授时精度保持在微秒级。
为了计算目标的绝对坐标,需要标定出激光雷达的绝对坐标与姿态,此标定通过激光雷达采集的点云与全局点云地图匹配实现。
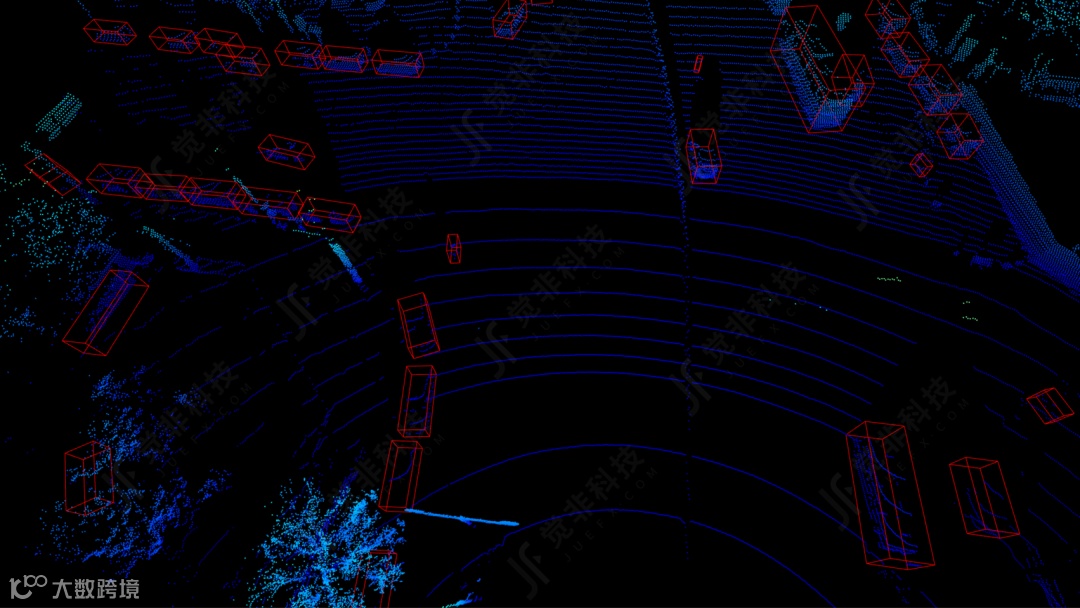
设备内部的MEC计算单元采用高算力芯片,通过感知与定位的深度学习方案,对视觉、激光点云等数据进行融合,对不同的交通参与者进行检测与追踪,可输出针对目标的全局坐标与航向数据。


图:3D目标检测和定位跟踪
觉非科技路侧融合感知解决方案




觉非科技两周年公开信:智能驾驶的数据创新与融合,奇点来临

觉非科技战略携手米文动力,车路协同数据融合与边缘计算能力再升级

觉非科技携手一径科技,全面推动车路协同实现规模化量产