
今天我们继续为大家带来本周的超材料前沿研究精选,内容涉及非厄米光学原子镜,光学微腔中的耗散的声光相互作用,单层WSe2和莫尔WS2/WSe2异质结中的相关层间激子绝缘体,一种具有流体传感功能的可编程3D打印材料等敬请期待!
索引:
1. 非厄米光学原子镜
2.光学微腔中的耗散的声光相互作用
3.用于二维光束控制的大视场硅光学相控阵
4.单层WSe2和莫尔WS2/WSe2异质结中的相关层间激子绝缘体
5.超高速小型软体电磁机器人
6.离散对称控制基于平行四边形的折纸几何力学
7.屏蔽软力传感器
8.一种具有流体传感功能的可编程3D打印材料
对称性和拓扑学的相关探索使得量子光学实现了重要突破,光与物质相互作用的非厄米物理特性也能够产生丰富现象。对于实现光物质相互作用的精细控制与构建新的量子光学装置和获得新功能至关重要。由于与自由空间发射产生的固有损耗使得具有偶极-偶极相互作用的原子阵列成为观察一系列非厄米物理现象的新切入点。人们提出在偶极子模式的协同响应的控制下,具有亚波长间距的原子阵列可以表征为高反射率的非厄米光学镜。对这种光学镜有着许多有趣预测,例如增强光子存储、拓扑量子光学、量子信息处理和相干完美吸收等。此外,非厄米物理中两个独特的现象是EP点的存在和非厄米的趋肤效应。EP点是非厄米矩阵中复数本征值和本征态的同时简并点,与EP点相关的黎曼表面拓扑在复数的能谱平面具有非平庸的绕曲从而引出了非厄米趋肤效应。即在开放边界条件下大量的本征态指数型局域在边界上,这也导致传统的体边关系失效。对此也出现了丰富的理论来解释非厄米的对应关系包括著名的非布洛赫能带理论。这个理论成功的解释了在具有有限范围耦合的一维系统中趋肤效应和指数化局域的趋肤模式,然而对于长程相互作用系统的非厄米现象较少发掘。
近日,来自中国台湾大学物理系、台湾中央研究院原子与分子科学研究所的Yi-Cheng Wang等人通过偶极子模式相关的二维亚波长原子阵列的协调共振实现了一个高反射率的非厄米光学原子镜。并且提出能带的简并和EP点的出现是来源于降低了方形原子晶格的晶体对称性发展而来。与此同时,从其拓扑非平庸的能谱结构中,他们阐明了这种出现在缎带状中的与几何结构相关的非厄米趋肤效应。此外,位于边界处的趋肤模式表现出一种源于长程相互作用的无标度行为,其机制超出了非布洛赫能带理论的框架。他们的工作为研究非厄米特性、拓扑和长程相互作用打开了大门。相关研究工作发表在《Nature Communications》上。(张晓萌)

文章链接:
Yi-Cheng Wang et al. A non-Hermitian optical atomic mirror. Nature Communications (2022) 13:4598.
https://doi.org/10.1038/s41467-022-32372-3
光与声自由度的相互作用在量子光学力学、声光调制与频率转换以及声传感与成像等多个领域得到了广泛的研究。光学微腔可以通过光约束在微尺度甚至纳米尺度上增强声光相互作用,为基础和应用研究提供了新的机遇。例如机械微孤子、单细菌振动和混沌机械呼吸等具有里程碑意义的实验已经被证明。近年来,声学传感、超分辨率光声成像和高时间分辨率原子力显微镜等领域的重要应用潜力得到了探索。
以往的研究主要依赖于声光色散作用,即声波调制折射率,改变腔体几何形状,从而导致共振位移。声光相互作用的完整描述包含耗散项,其中声波调制腔衰减率,改变光模式的线宽。然而,与色散相互作用相比,它的探索是滞后的,因为耗散贡献通常太弱而无法观测到。研究人员已经努力利用机械共振来增强耗散耦合,然而,在机械共振中,对离散和窄共振的精确控制需要依赖于悬浮分束纳米腔和辐条微磁盘等微妙的结构。
近日,北京大学的肖云峰教授课题组提出并实验证明了悬浮振动微纤维与耳语长廊微腔之间的强耗散声光相互作用。一方面,在声波的外部刺激下,耗散响应比色散响应强2个数量级;另一方面,在一定参数下出现零耗散响应,有望在物理传感方面发挥潜力,如精确的测量磁场和温度。然后探讨了强耗散声光相互作用用于宽带声波的超灵敏探测。实验表明,在空气中140 kHz时,噪声等效压力低至0.81 Pa,对腔Q因子不敏感,不依赖于机械共振。相关工作发表在《PHYSICAL REVIEW LETTERS》上。(郑江坡)

文章链接:
10.1103/PhysRevLett.129.073901
射频(RF)相控阵在一个多世纪前首次被提出,并已广泛应用于雷达和无线通信。红外线和可见光是光频率的电磁波,其波长比无线电波短3到5个数量级;因此,光学相控阵(OPA)可以带来比射频相控阵更高的精度。OPA可以以非机械的方式快速而精确地引导光线,因此代表了一种新型的紧凑固态二维(2D)光束转向技术,可替代包括微机电系统在内的传统机械光束转向技术。芯片级的OPA为固态光探测和测距系统开辟了一条有前景的道路,它在自动驾驶汽车、全息摄影、增强与虚拟现实、生物成像、自由空间光通信等领域有着广泛的应用。大视场、高光束质量、无混叠的二维光束定向是实现光学相干斑的关键。然而,由于不需要光栅瓣和旁瓣,目前的OPAs在视场和光束质量上仍然受到限制。传统的相控阵由相干发射体阵列组成,通过控制各发射体的相位,可以形成理想的远场辐射图。如果发射极间距为半波长或更短,可以带来无混叠180°视场,并且可以避免栅瓣。当发射极间距大于半波长时,在多个远场角处会产生强的相干干涉并产生栅瓣,从而导致混叠,限制视场。
近日,丹麦技术大学光子学工程系Hu Hao等人从理论上描述和实验上验证了一个二维无混叠波束转向体的光学相控阵(OPAs)器件,该器件可实现180°的视场角。研究人员通过使用半波长-间距波导阵列结合梯形板光栅作为单一发射器来实现这一目标。当光束从-40°转向+40°时,OPA具有较低的旁瓣电平(<-19dB),打破了FOV和光束质量之间的权衡。基于硅基芯片的OPA具有大的光束转向范围和高光束质量,为一种紧凑、固态、高性价比和高性能的光探测和测距系统等领域提供了一条应用前景十分广阔的道路,例如包括自动驾驶汽车、自由空间光通信、3D全息摄影、生物医学传感和虚拟现实在内的广泛应用产生革命性的影响。相关研究工作发表在《Optica》上。(丁雷)

文章链接:
Yong Liu, Hao Hu. Silicon optical phased array with a 180-degree field of view for 2D optical beam steering, Optica(2020).
https://doi.org/10.1364/OPTICA.458642.
单层WSe2和莫尔WS2/WSe2异质结中的相关层间激子绝缘体
激子是一种典型的集体激发,可被视为电子和空穴由于库仑相互作用而形成的束缚对。在窄隙半导体和二维材料中,激子的束缚能可能大于体系的单粒子能隙,因此体系内会自发形成大量的激子,表现为激子绝缘体相,在强磁场作用下使得能带趋于平坦,电子运动受到抑制。莫尔范德华异质结构中的超晶格已经成为量子现象研究中强有力的工具,在莫尔超晶格/六方氮化硼/半导体所组成的异质结中,可以同时实现平坦的能带和较强的层间电子-空穴耦合,这可能会导致新的相关量子相的出现,包括零磁场下的激子绝缘体等。
近日,加州大学伯克利分校王枫教授与合作者们研究了由超薄六方氮化硼分隔的WSe2单层和WS2/WSe2莫尔双层组成的异质结中的相关层间激子绝缘体。当每个莫尔晶格注入一个空穴时,莫尔WS2/WSe2双层膜表现为莫特(Mott)绝缘体状态,通过将等量的电子与空穴分别注入到Mott绝缘体和WSe2单层中时,会出现一个新的层间激子绝缘体,其中WSe2单层中的空穴与掺杂后的Mott绝缘体中的电子通过层间库仑相互作用紧密的结合在一起。另外还发现随着载流子的注入,当WSe2单层达到临界空穴密度之前,层间激子绝缘体相对稳定,当超过临界空穴密度后,层间激子会发生解离。相关工作发表在《Nature Physics》上。(袁铭谦)

文章链接:
Z. Zhang, E.C. Regan, D. Wang, et al. Correlated interlayer exciton insulator in heterostructures of monolayer WSe2 and moiré WS2/WSe2. Nat. Phys. (2022). https://doi.org/10.1038/s41567-022-01702-z
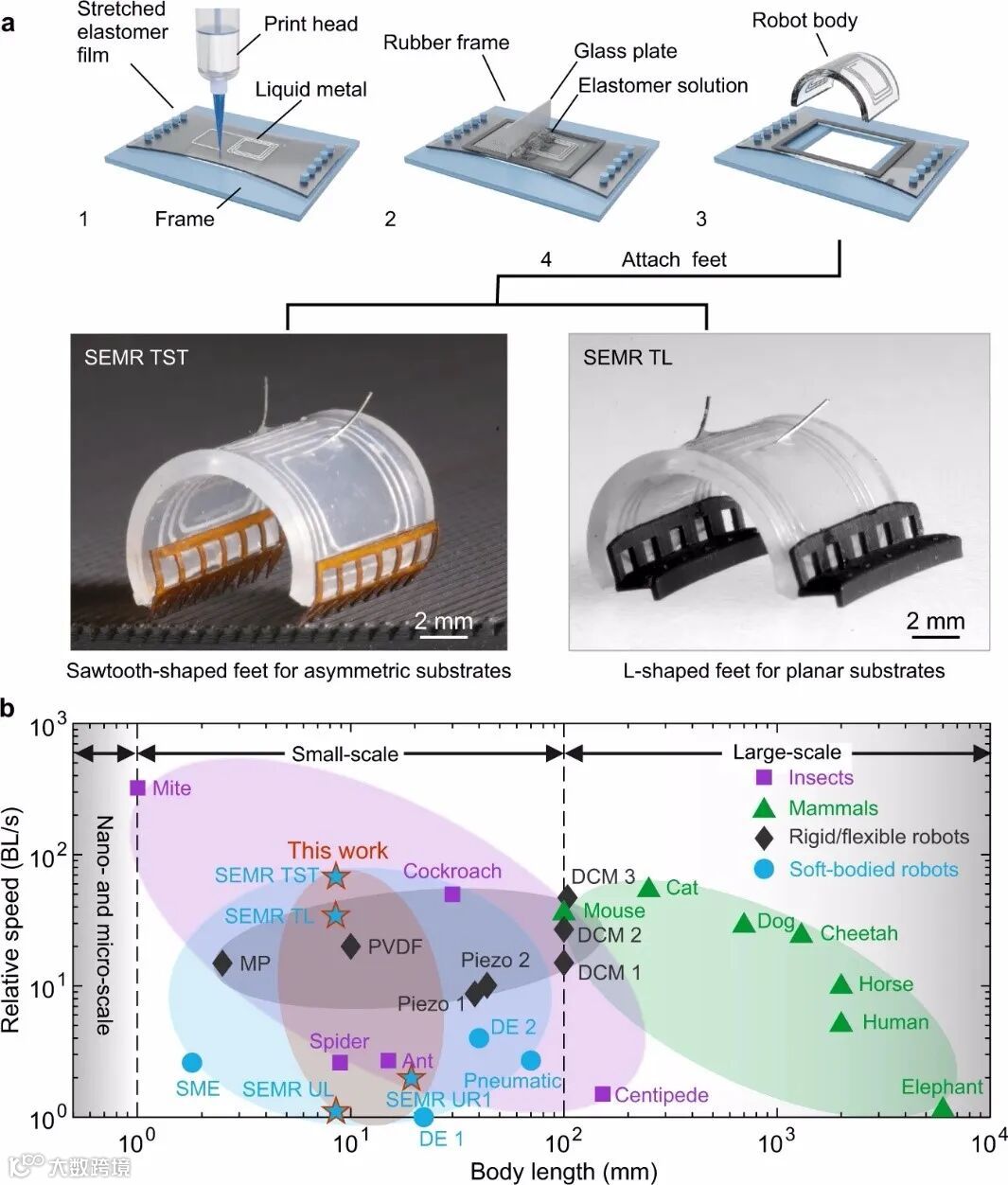
自然生物(如猎豹、兔子或蟑螂)以高速移动用于捕食或躲避捕食者。以体长计的相对速度(BL/s)可量化它们的移动速度,其中加州螨虫可达323 BL/s。而传统技术通过大型机械(BL>100 mm)和大功率发动机(如内燃机或电动机)实现高速运动,如f1赛车(50 BL/s)或四足机器人(9.1 BL/s)。由于传统高性能电机和传动系统的小型化困难,高速小型机器人的设计具有挑战性。由智能材料制成的简单结构为制造小型化机器人提供了另一种可能性。锆钛酸铅和形状记忆合金是两种典型的用于毫米级机器人的刚性智能材料,但其驱动行程太小或频率较低,无法实现高速运动。新兴的机器人和人机交互还需要软、安全、快速和鲁棒的设计,能够在恶劣的动态环境中操作。为了解决这些问题,机器人软智能材料(如热响应聚合物纤维、pH响应聚合物凝胶、光响应液晶聚合物和电场/磁场响应材料等)已经出现。然而这些软智能材料存在诸多缺点,如热和pH响应速度慢、介电弹性体驱动电压太高、软磁弹性体在多模块/群机器人设计中存在困难等。而软电磁执行器由嵌入在弹性衬底中的液态金属线圈组成,具有更好的局部可控性,在强静态磁场中具有高性能。液态金属3D打印技术的进步使软电磁执行器小型化到毫米尺度,为微米到厘米大小的高速移动开辟了道路。
近日,奥地利林茨大学Guoyong Mao和Martin Kaltenbrunner团队开发了一系列超快、健壮、多功能的小型软体电磁机器人(SEMRs),能够行走、奔跑、跳跃、游泳、转向,甚至运输和释放货物。这是通过在制造、机器人设计和建模方面的进步实现的,这些进步共同提高了机器人的性能,甚至可以在配备小型自供电控制器时进行无系留操作。制造中采用了在橡胶基板上打印液态金属线圈的方法,从而可以同时选择性地控制机器人身体的不同部分,实现转向和运输货物。应变失配的弹性双层结构使机器人在静态磁场中受到时变电流和适当的足部设计时能够行走。文章介绍了两种类型的SEMRs脚:用于非对称3D打印基板的锯齿形脚和用于平面基板的L形脚。SEMRs的运动在接近机械共振频率时变得超快,如实验所证明并得到分析和数值建模的支持。文章展示了SEMRs以70 BL/s的超快相对速度运行,比以前的软体机器人快约17.5倍,比厘米级电磁机器人和大多数动物快。此外,同样的SEMRs还能够以4.8 BL/s的高相对速度游泳,这与其他水上机器人和动物相比毫不逊色。相关研究发表在《Nature Communications》上。(徐锐)
文章链接:
G. Mao, D. Schiller, D. Danninger, et al. Ultrafast small-scale soft electromagnetic robots[J]. Nature Communications, 2022, 13(1).
https://doi.org/10.1038/s41467-022-32123-4
从拓扑绝缘体和超导体到受挫磁体和力学超构材料,离散对称描述了物理系统的特性。这种对称性可以决定周期性力学网络的刚性变形,包括负泊松比(拉胀)模式的产生。这种拉胀力学超构材料以膨胀应变或同步(穹顶状)曲率为特征,适用于常规材料无法实现的各种工程应用。虽然拉胀材料的这种膨胀面内行为通常与同步面外行为耦合,但一系列高度对称的折纸图案表现出相同和相反的面内和面外泊松比。折纸结构和组件由薄板组成,薄板的低能力学响应由其折痕图案的几何结构通过兼容性条件决定,兼容性条件将变形限制为等距,从而在不拉伸其面的情况下变换薄板。现代制造和驱动技术可以用于在宏观、纳米和微尺度上实现这种结构的自折叠,应用于工程和软体机器人技术。这些等距构型可以被认为是依赖于折痕图对称性的简并基态来刚性折叠。然而,这些对称性之间的相互作用以及折纸作为具有负泊松比或高刚度重量比的力学超构材料的功能尚未得到明确的探索。受折纸启发的超构材料利用折痕几何结构(通常基于对称性),生成具有负泊松比和高刚度重量比等不寻常特性的可展开和可重构结构。对此类结构的数学处理通常非常复杂和特殊,因此无法获得影响深远的解析解,也模糊了几何和机械响应之间的相互作用。
近日,美国乔治亚理工学院James McInerney和D. Zeb Rocklin团队开发了一种线性兼容性的形式,可以明确研究几何对称性和折纸折痕中的功能之间的相互作用。文章将这种形式应用于一类特殊的周期折痕图案,其单元由任意四个平行四边形面组成,并确定它们的力学响应具有反对称性。证明了这些模态是这个对称算符的本征态,并且这些模态同时与对称应变算符和反对称曲率算符对角化。该特征揭示了反对称性定义了一类折痕图案几何的等价类,这些折痕图案具有相等和相反的面内和面外泊松比。最后,证明了当折痕图案在简并基态之间刚性折叠时,这种泊松比一般会改变符号,并且确定了在所有构型中具有严格负的面内或面外泊松比的子族。总结了对未来工作的延伸和实验性实施。相关研究发表在《Proceedings of the National Academy of Sciences》上。(徐锐)

文章链接:
J. McInerney, G. H. Paulino, D. Z. Rocklin. Discrete symmetries control geometric mechanics in parallelogram-based origami[J]. Proceedings of the National Academy of Sciences, 2022, 119(32): e2202777119.
https://doi.org/10.1073/pnas.2202777119
软力和应变传感器能够为诸多领域提供所需的感知,例如人机交互、可穿戴电子设备、和健康监测系统等。这些软传感器具有机械兼容性,可以安装在非平面表面上,并且不会阻碍运动。这些功能是使软机器和可穿戴设备能够智能地响应周围环境的关键。在传感原理中,电容传感由于其低功耗(驱动电流在µA范围内)、快速响应、相对简单的读出和简便的制造工艺而被广泛采用。然而,电容式传感器非常容易受到运动或附近物体的存在以及低水平电磁(EM)干扰的影响。尽管有大量研究和众所周知的外部干扰效应,但现有的软电容传感器缺乏允许在移动导体、电机或其他时变电场源附近运行所需的电磁屏蔽。这将软电容传感器的使用限制在具有严格控制环境的实验室环境中。
近日,来自瑞士洛桑联邦理工学院(EPFL)软传感器实验室(LMTS)的Bekir Aksoy等人通过图案化中央传感弹性体层来控制其可压缩性来应对这一关键挑战。一种设计使用超软硅胶泡沫,另一种设计使用充满液态金属和空气的微通道。法向和剪切方向的力分辨率均低于mN,但传感器可承受较大的力(>20 N),显示出较宽的动态范围。性能不受附近高直流和交流电场甚至电火花的影响。相关研究工作发表在《Nature Communications》上。(张晓萌)

文章链接:
Bekir Aksoy et al. Shielded soft force sensors. Nature Communications (2022) 13:4649.
https://doi.org/10.1038/s41467-022-32391-0
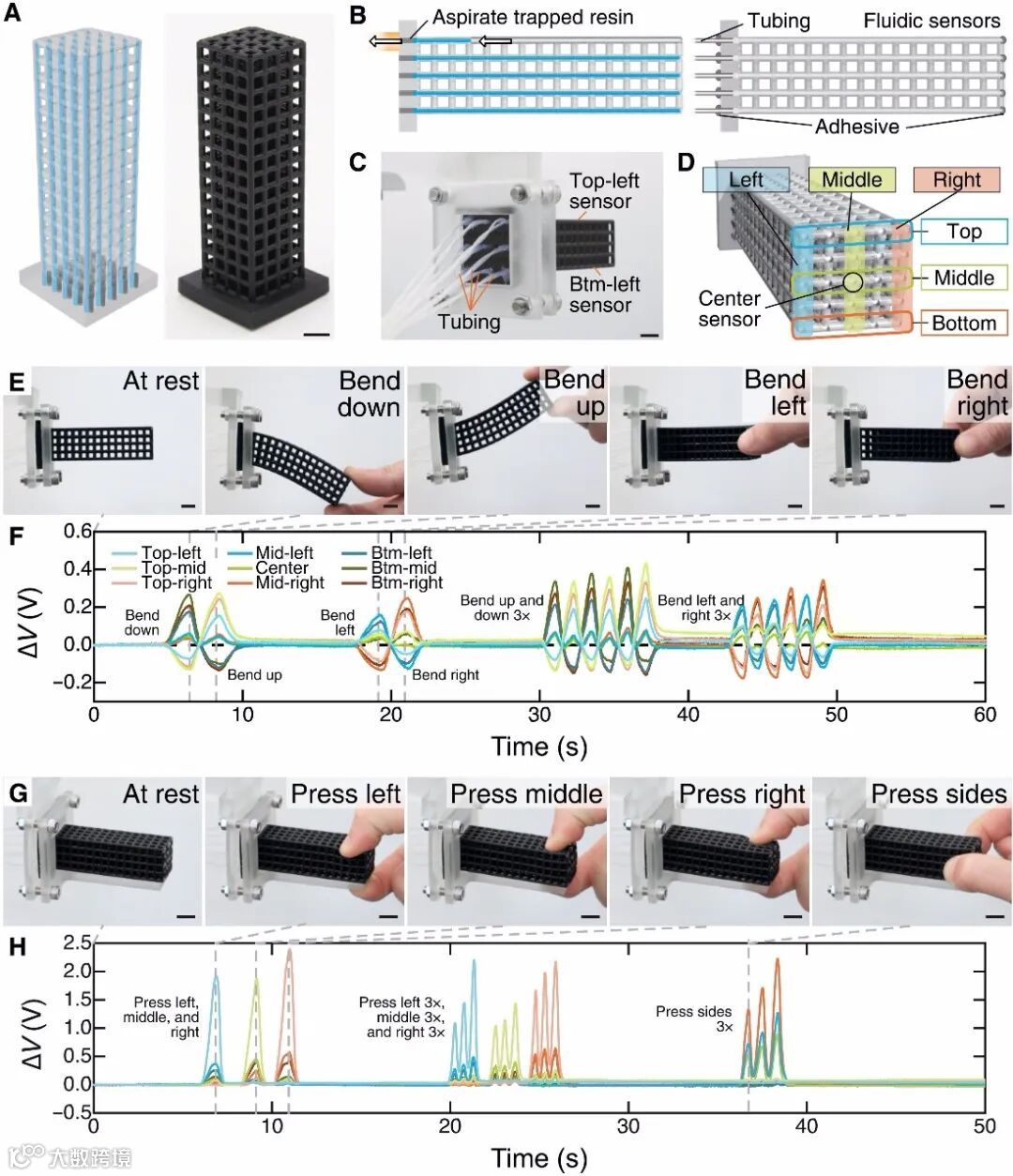
多功能性是生物系统的组成和形式的一个决定性特征。这些生物材料和结构的的组成和形式是为了在单一的复合材料中满足多种功能需求,使生物能够有效地实现其持续生存和进化适应所需的性能。受这些生物结构的启发,研究人员开始探索材料设计的多功能性,将其作为一种策略,以提高广泛应用的新技术(智能结构、可穿戴设备和机器人)的性能、功能范围和效率。然而,新兴技术的很大一部分需要具有可编程机械性能和分布式传感的多功能材料。超构材料是作为一类完全通过几何形状实现可定制机械性能的材料。这使其成为实现最佳编程机械性能的材料,例如,改变晶格中单元的尺寸或形状,使材料的刚度变高或变低。虽然超构材料能够表现出独特的性能,但是集成传感的功能却受到了挑战。因为超构材料通常具有稀疏、复杂的形状,将传感器放在外部比嵌入到材料内部更加简单高效的策略。然而,超构材料对几何形状的依赖使得它们很难被传感。因此,如何利用一种3D打印超构材料实现具有可调节的机械性能,并能够感知自身运动以及与环境之间的相互作用已成为智能结构设计的重要挑战。
近日,美国西北大学助理教授Ryan L. Truby从采用3D打印将充气的通道直接嵌入到超构材料的内部结构中来解决这个问题。当结构被移动或挤压时,通道就会变形,内部压力可以在变形过程中作为电压信号进行测量,并可以用作感觉反馈。这项技术可用于制造具有嵌入式传感器的柔性软体机器人,使机器人能够理解自己的动作与姿势。它也可以用于制造可穿戴的智能设备,为个人如何运动以及与环境如何交互提供反馈。在此策略下,研究人员基于手剪切辅助学构造了传感软机器人执行器,并利用有监督学习从传感器的本体感觉反馈中准确地预测其运动学。基于通过控制形状来促进结构、传感和驱动能力的策略,简化了可穿戴设备、智能结构和机器人应用的传感材料设计。相关研究发表在《Science Advances》上。(何玉龙)
文章链接:
Ryan L. Truby, Lillian Chin, Annan Zhang and Daniela Rus. Fluidic innervation sensorizes structures from a single build material [J]. Science Advances, 2022,8(32): eabq4385. https://www.science.org/doi/10.1126/sciadv.abq4385
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理(按照法规支付稿费或立即删除),所有来稿文责自负,两江仅作分享平台。转载请注明出处,如原创内容转载需授权,请联系下方微信号。



