


撰稿|由课题组供稿
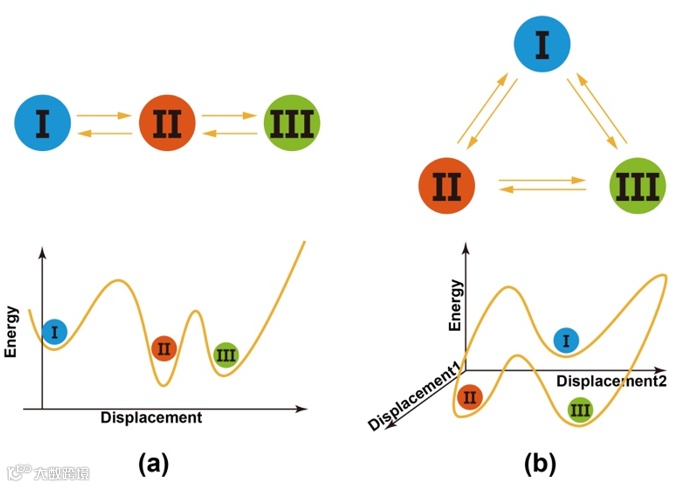
图1 相继与非相继三稳态机构的区分

图2 三稳态驱动器的设计

图3 三稳态驱动器的能量图

图4 双向爬行以及跌落自重启爬行机器人设计
该论文的第一作者为西安交通大学机械学院的博士生姜磊,西安交通大学机械学院副教授李博为唯一通讯作者。合作者包括西安交通大学机械学院教授陈贵敏;西安电子科技大学机电工程学院讲师马付雷。相关研究得到了国家自然科学基金委、陕西省科学技术厅等的联合资助。
Lei Jiang, Bo Li*, Fulei Ma, Guimin Chen, A Tristable Actuator for a Bidirectional Crawling and Falling-Rebootable Robot,IEEE/ASME Transactions on Mechatronics,2023.
论文链接:
https://ieeexplore.ieee.org/document/10297974
