


撰稿 | 微 光
人类获取的信息80%以上来自视觉,成像系统作为核心技术已经在科学观测、智慧城市和公共安全等方面取得了长足的发展。针对动态大场景多对象(十亿像素成像)兼顾“看得全”和“看得清”的迫切需求,面临宽视场与高分辨不可兼得的固有矛盾。科学家们瞄准这一难题历经了探索与攻关,取得了系列突破。
第一代单像感器成像系统(以Gigapan为代表),通过扫描拼接成十亿像素图像;第二代结构化阵列像感器成像系统(以杜克大学AWARE为代表),沿用均匀采样原理,采用同构像感器阵列,硬件结构固化,标定过程依赖相邻像感器重叠的视场区域,标定算法复杂度高。进一步提高系统的鲁棒性和可扩展性代价大。
针对宽视场与高分辨的固有矛盾,清华大学方璐团队另辟蹊径,率先提出了非结构化计算成像新原理,成功研制了阵列像感器十亿像素智能成像系统(UnsctructuredCam)。
非结构化计算成像新原理的特征是“层内非结构”和“层间主从式异构”:(1)“层内非结构” 摒弃了现有结构化阵列的均匀化采样、信号同分布假设,突破了相邻像感器间结构固化和视场重叠的制约,赋予像感器阵列场景内容自适应成像的能力;(2)“层间异构”提出了主从式硬件子系统分治机制和多尺度场景内容关联机制,突破了现有结构化阵列像感器尺度单一和难以扩展的瓶颈,赋予阵列像感器成像系统高鲁棒、易标定、可扩展特性。实现了十亿像素级全景360度动态三维成像,提出了高分辨参考的跨尺度深度超分辨算法,全局像感器感知低分辨全景深度,局部像感器感知高分辨细节,实现了动态大场景百米级深度感知与重建。


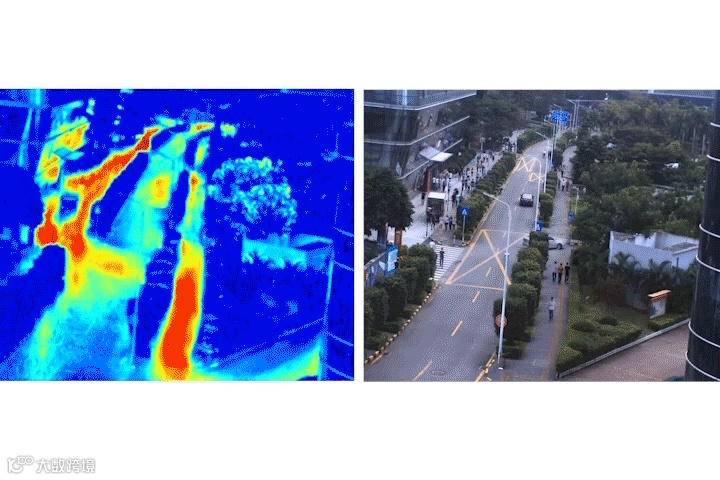
图1 阵列像感器十亿像素智能成像系统(UnsctructuredCam)
视频1:UnstructuredCam具有高鲁棒和易标定特性
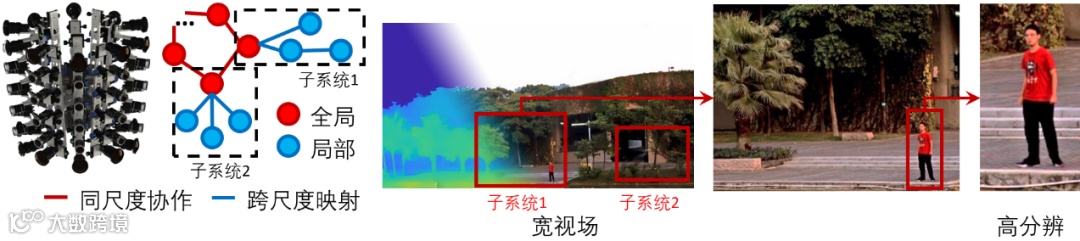
图2 UnstructuredCam具有视场和感知维度可扩展特性
视频2:十亿像素级全景三维成像
课题组应用UnsctructuredCam构建了国际首个十亿像素级大场景多对象视频数据平台PANDA (gigaPixel-level humAN-centric viDeo dAtaset),对象标注框达3000人/单帧,对象尺度变化超500倍,对象遮挡比例达50.9%。PANDA突破了人眼视觉分辨率的极限,填补了大场景下高密度人群数据平台的空白,为探索视觉智能新方向提供了不可或缺的数据基础。
视频3:十亿像素智能成像
研制的非结构化阵列像感器十亿像素智能成像系统可应用于边海防、智慧城市、公共安全、无人系统、虚拟现实等领域。
本文通讯作者为方璐副教授,第一作者为清华大学博士后袁肖赟和季梦奇。该项目得到了国家自然科学基金的支持。
参考:
[1] luvision.net
文章来源:中科院长春光机所 Light学术出版中心
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理(按照法规支付稿费或立即删除)。转载请注明出处,如原创内容转载需授权,请联系下方微信号。
