


今天我们继续为大家带来本周的超材料前沿研究精选,内容涉及拓扑声子逻辑,自由无序超表面中的长程有序,具有磁相互作用的相转变超构材料等敬请期待!
索引:
1.氮化硅微谐振器中光学可重构准相位匹配
2.拓扑声子逻辑
3.综述:声子超材料的智能按需设计
4.级联时间调制平板谐振器的非互易声传播
5.自由无序超表面中的长程有序
6.拓扑孤子使超构材料爬行
7.具有磁相互作用的相转变超构材料
8.机器学习加快材料科学创新研究
9.用于弹性跳跃机器人的肌腱驱动拉胀管弹簧
1.氮化硅微谐振器中光学可重构准相位匹配
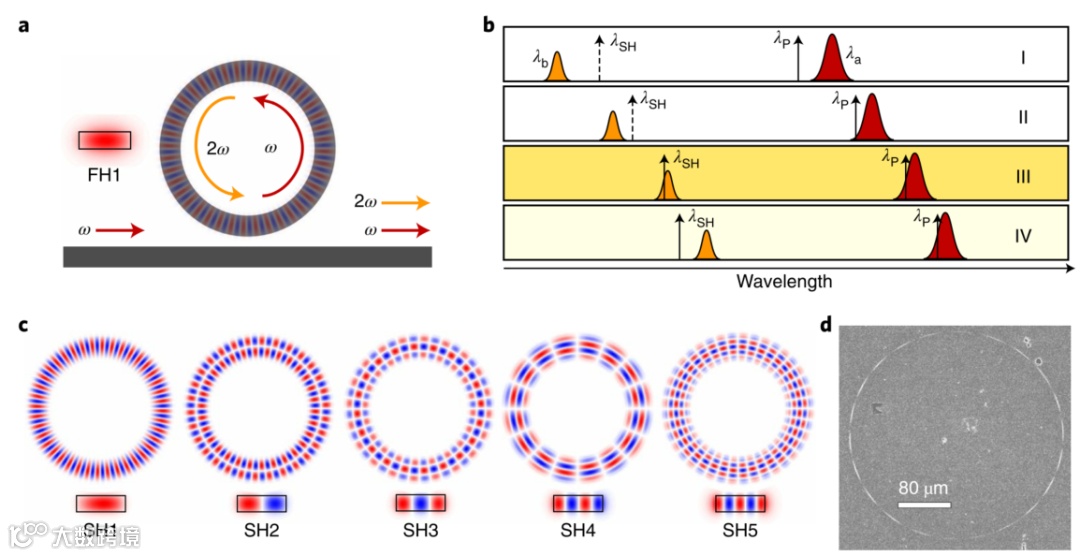
在芯片上演示有效的参数频率转换一直是集成光子的主要目标之一。特别是,在集成器件中引入二阶非线性(χ(2))可以提供一种提高转换效率(CE)的方法,并在相关计量、量子光子和光通信的应用中增加功能。准相位匹配一直是非线性光子学中广泛使用的一种方法,可以实现有效的参数频率转换,如二次谐波产生。然而,在硅光子学中,由于最适合于光子集成的材料缺乏二阶磁化率(χ(2)),实现动量守恒的方法有限,因此这项任务仍然具有挑战性。
近日,来自瑞士STI-IEM光子系统实验室(PHOSL)的Edgars Nitiss等人介绍了在大半径氮化硅微谐振器中实现的光学可重构准相位匹配,其芯片上产生的二次谐波功率高达12.5-mW,转换效率为47.6% W−1。最重要的是,他们表明,这种全光极化可以发生不受多模相位匹配的约束,导致广泛可调谐的二次谐波产生。他们通过对χ(2)光栅结构在微谐振腔内的双光子成像,以及在全光极化过程中对泵浦和二次谐波模共振的原位跟踪,证实了这一现象。这些结果明确地建立了光电效应,负责全光极化,可以克服相位失配约束,甚至在谐振系统中也可以克服。相关研究工作发表在《Nature Photonics》上。(詹若男)
文章链接:
Edgars Nitiss et al. Optically reconfigurable quasi-phase-matching in silicon nitride microresonators. Nat. Photon. (2022)
https:/ / doi.org/10.1038/ s41566-021-00925-5
2.拓扑声子逻辑
拓扑绝缘体最初被认为是具有绝缘体和导电表面狄拉克态的量子电子材料,允许无耗散电荷和沿边界的自旋输运。它们的核心原理—能带反转—也出现在许多经典晶格系统中,启发了具有拓扑保护输运的光子、声子和机械超材料的设计。它们的坚固特性已被用于零折射率材料和负折射率材料、隐身、以及比非拓扑替代品性能更好的声光保护波导等广泛应用。剩下的一个关键挑战是,以一种允许波导相互切换的方式来控制拓扑相位,为拓扑逻辑电路比当前CMOS技术更高效铺平道路。拓扑超材料可以从Dirac超材料出发,通过增强对称或偶然简并来设计。后一种情况为拓扑开关、波导和隐身器件的设计提供了更大的灵活性,因为大量的调谐参数可以用来打破简并诱导拓扑相位。然而,拓扑逻辑元件的设计——一个可以由独立开关的输出控制的开关——仍然是难以捉摸的。
近日,来自美国哈佛大学物理系的Harris Pirie等人利用蜂窝晶格中偶然简并的大相空间数值模拟了一种超声拓扑逻辑门。他们发现简并可以被六个物理参数打破,并且他们展示了如何调整这些参数来通过超声波加热在拓扑波导和普通绝缘体之间转换声子开关。本设计方案可直接应用于光子晶体,对未来电子拓扑晶体管的设计具有指导意义。相关研究工作发表在《Physical Review Letters》上。(詹若男)

文章链接:
Harris Pirie et al. Topological Phononic Logic. Physical Review Letters 128, 015501 (2022).
DOI: 10.1103/PhysRevLett.128.015501
3.综述:声子超材料的智能按需设计
随着人们对人工材料领域的兴趣日益浓厚,对声子晶体和声学超材料提出了更先进和更复杂的功能。这意味着需要很高的计算工作量和成本,但设计的效率可能仍然不够。在第三次人工智能技术的帮助下,这些材料的设计方案正在经历一场新的革命。机器学习作为人工智能的一个重要分支,通过刺激结构设计的探索,为新的技术创新铺平了道路。机器学习基于候选结构的数据集,通过探索高维空间中的非线性物理模式,为实现高效、准确的设计过程提供了强有力的手段。许多先进的机器学习算法,如深度神经网络、无监督流形聚类、强化学习等,已经在许多结构设计中得到了广泛和深入的研究。
近日,同济大学的李岩教授团队和汉诺威莱布尼茨大学的Xiaoying Zhuang教授团队就近年来声子超材料与机器学习相结合的研究进展进行综述。作者们提供了一个关于结构设计的机器学习的概述。然后讨论了机器学习驱动的声子超材料的声波和弹性波函数,拓扑相位和原子尺度的声子特性。最后,作者们总结了目前的研究现状,并对未来的发展方向进行了展望。相关工作发表在《Nanophotonics》上。(郑江坡)
文章链接:
https://doi.org/10.1515/nanoph-2021-0639
4.级联时间调制平板谐振器的非互易声传播
实现非互易性的一种方法是应用时空调制(STM)介质来打破时间反演对称性。这一想法最初是1959年在光学和电路中提出的,在光子学和电路中,介电常数、磁导率或阻抗在空间和时间上都受到谐波调制,从而为波产生单向带隙。最近,制造和表征技术的进步使得研究人员对这种时空调制系统展开深入研究。受光学的启发,声学和弹性动力学提出了基于STM的多种设计。然而在声学中,非互易性的物理基础是将频域中的布拉格带隙向相反方向移动,以禁止波单向传播。该机制通过多个周期(至少10个周期)时空调制组成的材料特征参数来实现。因此,系统的周期部分必须精确同步,这使得实验的实现非常困难,限制了设备的实用性。例如,在声学中,虽然动态改变空气的有效密度在局部是可能的,但在空间和时间上沿几个周期进行精确的谐波调制仍然是一个挑战。相反,通过调节材料的有效刚度,基于STM的非互易性在弹性动力学中变得相对容易实现。然而,这一过程要引入连接到电路的压电元件,同时具有同步调制的复杂性。整个非互易装置变得笨重,限制了未来的实际应用。
近日,法国洛林大学Jean Lamour研究所的Mourad Oudich和Badreddine Assouar研究团队证明了非互易声波在两个级联法布里-珀罗型平板谐振器中的传输,这些平板谐振器的有效密度受到了时间调制。在两个耦合谐振器之间的时间调制中引入相位差,以产生空间偏置以访问单向波传播。并且他们还建立了基于平面波展开和传递矩阵法的法布里-珀罗系统理论模型。理论模型能够快速准确地描述声色散,其结果与基于有限元的数值模拟非常一致。该团队证明了基本声学模式的声学非互易性,并且经过适当的优化后,耦合法布里-珀罗器件可以实现非互易声学频率转换。这项工作对设计简单紧凑的非互易声学装置有一定的启发性,有望实现有效的波控制。相关研究成果发表在《Physical Review Applied》上。(钟雨豪)

文章链接:
https://doi.org/10.1103/PhysRevApplied.16.064061
5.自由无序超表面中的长程有序
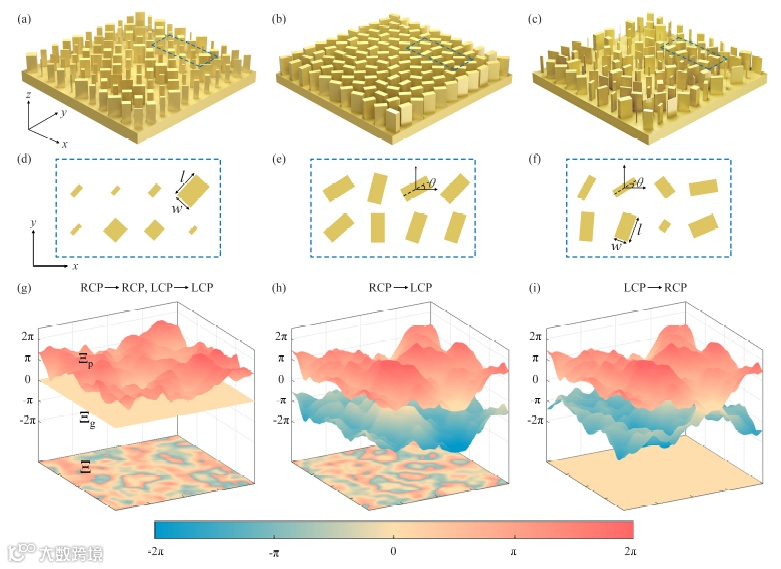
由于光学随机散射的不可控性,不规则或无序结构被认为是传统光学器件设计和制造中的一个不利因素。例如光子晶体是由有序周期结构组成的典型光学器件,其中的缺陷或无序会导致固有光子带隙的破坏,从而损害波传播的实际性能。相反,微纳米光子学的最新研究表明,具有空间不均匀材料的无序结构,可以作为另一个自由度来产生各种新的光学现象。由人工纳米结构(或元原子)阵列组成的超表面可以在亚波长尺度上任意操纵入射光场的振幅、相位和偏振,因此已广泛应用于平面成像、元全息图、量子光学和复合波束发生器。最近,无序工程通过随机操纵元原子的空间不均匀相位延迟引入到亚表面,导致无序相位亚表面,作为新兴有趣功能的紧凑和多功能平台。然而,以前的工作主要关注无序功能,而无序亚表面中相反的功能顺序被严重忽略。事实上,无序中存在的有序是一个重要的概念,在各种无序结构中得到了广泛的应用。不幸的是,如何在无序的超表面中形成长程有序一直不为人知。
近日,中科院光电技术研究所微细加工光学技术国家重点实验室的Mingbo Pu和中国科学院大学光电学院的Xiangang Luo联合研究团队提出了一个长程有序平面内相位分布的一般框架,通过超表面单元设计无序参数和拓扑优化。在该无序超表面中,传播相位和几何相位均随机分布,进而获得空间均匀的平面内相位分布。根据不同的极化转换,超表面表现为随机散射或单向传输。此外,通过基于伴随的拓扑优化,他们进一步提出了一种自由形式的无序超表面,能够同时抑制面内相位和面内振幅波动,这是拓扑优化在无序超表面中的首次应用。结果表明,拓扑优化后的相位起伏范围比初始无序超表面提高了约4倍,而透射圆偏振光的相对效率提高了约39%。此外,理论结果通过三个不同的实验得到了很好的证明。该团队的一般框架可以扩展到其他类型的相位延迟机制,为激发无序超表面和无序光学中的奇异光学现象开辟了新途径。相关研究发表在《Advanced Materials》上。(钟雨豪)
文章链接:
https://doi.org/10.1002/adma.202108709
6.拓扑孤子使超构材料爬行
从蜗牛、蚯蚓到变形虫,许多生物体利用波浪和摩擦控制来运动。它们奇特的动作激发了机器人系统的设计灵感,这些机器人系统利用弹性变形在密闭空间中进行机动。这些机器人通常包括多个执行器,这些执行器经过精确排序以实现爬行。为了降低控制的复杂性,已经利用了最多样化的现象,包括机械不稳定性、粘性力、孤立脉冲和振荡材料。然而,仍有一些未解开的机制可以被研究和利用来实现这一目标。近年来,已经看到力学超构材料作为简单而有效的平台在线性和非线性区域控制弹性波的兴起。通过多重稳定性,科学家们进一步扩展了这种超构材料支持拓扑孤子的能力:出现在不同相分离区域的界面,也称为畴壁、缺陷和过渡波。这种拓扑孤子不仅显示出丰富的物理特性,而且具有广泛的应用前景,包括单向传播、能量收集和机械逻辑。
近日,哈佛大学Katia Bertoldi教授团队受拓扑孤子丰富物理学的启发,研究了如何利用它们来制造多稳态超构材料爬行器。首先关注基于旋转平方机制的1D双稳态晶胞链,并研究其非线性动态行为。这种简单的超构材料平台具有支持拓扑孤子传播的优势,其中两个分量以相同的速度传播:一个是平移,一个是旋转。与先前在单稳态力学超构材料中观察到的孤立脉冲不同,文章研究的拓扑孤子表现出对缺陷的鲁棒性,并且不需要脉冲触发。因此,它们代表了设计简单机器的理想平台,这些机器可以在低速输入下驱动并运行许多周期。特别是,文章展示了这种拓扑孤子如何将一维结构变异为爬行装置,为此,控制的复杂性被转移到材料本身的力学中。此外,所提出的概念可以扩展到2D曲面细分,为能够遵循任意复杂轨迹的简单而强大的机器人结构开辟了道路。相关研究发表在《Physical Review Applied》上。(徐锐)

文章链接:
B. Deng, M. Zanaty, A. E. Forte, et al. Topological Solitons Make Metamaterials Crawl[J]. Physical Review Applied, 2022, 17(1).
https://doi.org/10.1103/PhysRevApplied.17.014004
7.具有磁相互作用的相转变超构材料
固-固相变可以增强能量转换以驱动运动。类似地,液晶弹性体中的相变,从良好排列的向列状态到随机排列的各向同性状态,也可驱动运动。这种相变还可以改变材料系统的机械性能。这类转换提供了对能量转换的理想控制,这有利于耗散能量和保护系统免受损坏。然而,可预见地设计这些转变及其对材料特性的影响是具有挑战性的。力学超构材料提供了克服这一挑战的机会。力学超构材料已被用于编程应力应变响应、调制弹性波传播和控制能量耗散。通常依靠内部几何变化来引入功能,利用弹性材料的已知非线性几何力学。这种方法被广泛采用,因为可以很容易地推导出分析或数值模型来理解和预测观察到的行为,从而为材料响应的系统编程提供途径。
近日,美国马萨诸塞大学Alfred J. Crosby和梁旭东博士团队开发了弹磁超构材料,这种材料由于内部弹性结构和嵌入的宏观磁畴之间的非线性相互作用而显示出相变行为。这些相变类似于形状记忆合金和液晶弹性体中的相变,在应变状态和机械性能方面具有有益的变化,可以驱动运动和管理整体能量转换。随着相变发生,弹磁超构材料的本构响应发生变化,导致非单调应力-应变关系,可用于增强或减轻高应变率事件下的能量存储和释放,如脉冲反冲和冲击。使用基于朗道自由能的预测模型,开发了一个定量相图,将几何和磁相互作用与相变联系起来。这项工作展示了超构材料中的可控相变如何为高速应用提供能量管理和可编程材料特性方面的性能。相关研究发表在《Proceedings of the National Academy of Sciences of the United States of America》上。(徐锐)

文章链接:
X. Liang, H. Fu, A. J. Crosby. Phase-transforming metamaterial with magnetic interactions[J]. Proc Natl Acad Sci U S A, 2022, 119.
https://doi.org/10.1073/pnas.2118161119
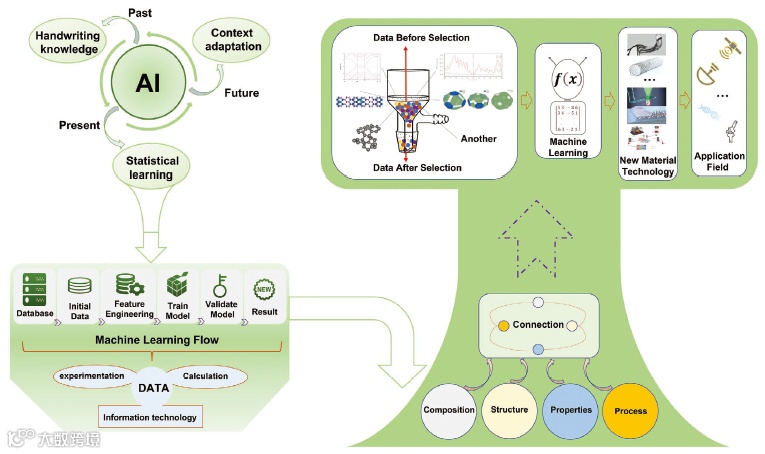
在人类社会的现阶段,人工智能(AI)技术正成为世界范围内发展的一种趋势。特别是在视觉识别、语音识别、自然语言处理和人机交互等领域的成功应用,也促进了不同知识的融合和多学科的交叉。例如,2017年,所谓的AlphaGo Zero在与“前辈”AlphaGo Lee的比赛中取得了100:0的成绩;《自然》杂志的一篇封面文章报道,2020年,一名不知疲倦的移动机器人化学家能够在8天内自主操作,在10个变量的实验空间内进行688次实验,并最终选择了一种新型高效的光催化剂。一般来说,AI的实施过程分为三个阶段:手写知识、统计学习和语境适应,目前我们研究处于统计学习水平。其中关键的核心技术依赖于统计机器学习,如深度学习,强化学习,对抗学习等等,这些技术大大提高了在信息数据挖掘、数据分类,新数据预测领域的效率。目前,基于这种机器学习过程的人工智能已成为科技和产业革命最重要的推动力。在工业革命和人类社会发展的过程中,物质创新一直发挥着巨大的作用如先进的合金、半导体材料、高分子材料、复合材料、超导材料和生物相容性材料,推动了新能源、微电子、生物工程技术和空间技术的技术革命,打开了前所未有的信息社会的大门。在不久的将来,新型材料科学技术的发展正加速向互联化、智能化方向发展,这将进一步推动第四次工业革命绿色智能产业的发展。与材料科学传统的实验和计算驱动的研究方法相比,基于数据挖掘和人工智能的高通量实验、高通量计算和材料数据的数据驱动模式在未来的发展中将更具革命性。
近日,中国地质大学黄朝晖教授等人总结了材料科学中机器学习面临的挑战和目前的进展,对设计策略进行了分类和强调,并对未来的发展提出了可能性的展望。作者希望该篇综述能为今后利用机器学习加快材料科学与工程技术研究提供重要的科学指导。相关研究工作发表在《Advanced Functional Materials》上。(丁雷)
文章链接:
Chaochao Gao et al, Innovative Materials Science via Machine Learning, Adv. Funct. Mater. 2022.DOI: 10.1002/adfm.202108044.
具有刚性部件和连杆的传统机器人可以快速、稳健地程序化运动。然而,它们很笨重并且需要大尺寸电池来供电。因此,它们的运动自由度有限,自适应能力较低。相比之下,生物有机体重量轻,具有固有的柔韧性,能够适应大自由度的不同环境。有足机器人不仅有良好的稳定性,而且会可以在跳跃过程中弹性能量的储存和释放效率。受动物行为的启发,将弹性驱动器与弹性元件串联在一起,应用于柔性机器人。虽然软材料本质上是柔性的,但它们是有损耗的。这是因为聚合物链在变形时相互缠绕或滑动,导致弹性能以热能损耗,从而增加了成本、降低了效率,限制了其在准静态下的应用。为了克服软材料的内在局限性,构建力学超构材料在提高机器人的敏捷性和功率密度方面越来越受到关注。通过结构的弯曲、折叠、旋转和屈曲,力学超构材料可以执行不同的集体动作。
近日,美国宾夕法尼亚大学Shu Yang教授团队开发了由热塑性聚氨酯(TPU)制成的3D可打印拉胀管状弹簧,用于快速和可持续的跳跃。由于弹簧具有负泊松比,它们会随着压缩的进行而变得更硬,理论上比具有相同刚度的线性弹簧多存储35.2%的能量。当应力集中在铰链上时,通过实验、数值和仿真揭示了铰链几何形状,如晶格角和铰链半径,决定了弹簧的整体刚度和鲁棒性。由三个平行拉胀管状弹簧组成的跳跃机器人腿可承受1000多次重复的单自由度垂直跳跃和两自由度向前跳跃循环。随着接地角增加到0.125 rad,跳跃机器人的平均速度达到0.06 m·s-1。运输成本计算为6.7,与蜥蜴和大鼠的值相当。因此,由于拉胀的负泊松比行为,制造具有更高刚度的轻质弹簧很有吸引力。相关研究发表在《Advanced Intelligent Systems》上。(徐锐)

文章链接:
Y.-J. Lee, S. Misra, W.-H. Chen, et al. Tendon‐Driven Auxetic Tubular Springs for Resilient Hopping Robots[J]. Advanced Intelligent Systems, 2021.
https://doi.org/10.1002/aisy.202100152
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理(按照法规支付稿费或立即删除),所有来稿文责自负,两江仅作分享平台。转载请注明出处,如原创内容转载需授权,请联系下方微信号。
