


今天我们继续为大家带来本周的超材料前沿研究精选,内容涉及动态应变下时空控制的室温激子输运,全光学耗散的离散时间晶体,拓扑保护的量子纠缠发射器等敬请期待!
索引:
1.动态应变下时空控制的室温激子输运
2.全光学耗散的离散时间晶体
3.拓扑保护的量子纠缠发射器
4.波导耦合III-V光电二极管单片集成在硅上
5.机械超材料的韧性
6.用于形状变形的微尺度拉胀层级力学超构材料
7.填补拓扑绝缘体纳米材料与摩擦电纳米发电机之间的空白
8.用于软体机器人的双稳态和多稳态执行器:结构、材料和功能
1.动态应变下时空控制的室温激子输运
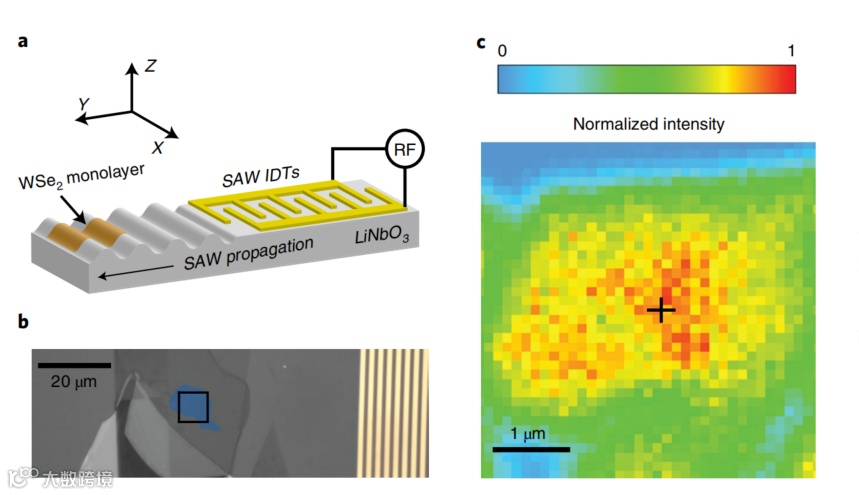
库仑束缚的电子-空穴对(通常被称为激子)为在纳米尺度上传输能量提供了一个有效的平台。激子具有小尺寸和与光子的无缝跃迁,具有在能量转换、发光、化学传感、信息处理和通信等方面的各种应用的潜力。随着最近出现的二维半导体,如过渡金属双卤代化合物(TMDs),它支持具有高扩散率和结合能的激子(>100meV),室温激子器件的可行性不再值得怀疑。然而,激子通量的空间操纵对于控制纳米尺度的能量流至关重要,这仍然是一个挑战,特别是在室温下。与在外加电场下漂移的带电粒子不同,电荷中性激子通量的定向传输是通过外部刺激(如机械应变或电场)对激子势进行空间调谐来实现的。声表面波(SAWs)可以动态地利用这两种效应来实现声波远程传输。虽然大多数报道的SAW辅助输运是基于激子在压电场解离后的单个电荷的输运,但在III-V量子阱系统中也实现了来自SAW的动态应变下的激子输运。然而,它仅限于低温,并利用外部电场产生的间接激子。TMD具有带隙对外部应变的大灵敏度,非常适合于仅在动态应变下实现直接激子的室温定向输运。在单层材料中,SAW已成功地用于长程载流子输运、提高光导率、声子调制和激子光致发光(PL)。
近日,美国密歇根大学安娜堡分校的Kanak Datta等人研究研究了在室温下,单层二硒化钨(WSe2)体系中激子通量的时空控制。利用IDT在128°Y切铌酸锂衬底上产生高频(谐振频率,~745MHz)瑞利波。采用干法转移技术,将六方氮化硼(hBN)封装的机械剥离单层WSe2转移到SAW延迟线上。利用相位同步时空测量和利用光生自由载流子筛选平面内电场,作者报道了在i型带隙调制下的定向激子输运。在实验基础上,当应变振幅为0.086%时,提取了漂移速度为600ms-1,估计中性激子迁移率约为900cm2(eVs)-1。相关工作发表在《Nature Photonics》上。(郑江坡)
文章链接:
https://doi.org/10.1038/s41566-021-00951-3
2.全光学耗散的离散时间晶体
时间晶体是一种周期态,在时间无关或周期驱动的量子多体系统中均表现出自发对称破缺。周期性迫使物理系统中离散时间平移对称的自发修正可以产生离散时间晶体(DTC),它构成了具有时间刚性长程有序和相干等特性的物质状态,这是量子计算和信息处理所固有的需求。尽管它们很有吸引力,但DTCs的实验演示却很少,而且它们行为的重要方面仍未被探索。
近日,来自加州大学河滨分校电子与计算机工程系的Hossein Taheri等人报道了在Kerr非线性光学微腔中DTCs的实验观察和理论研究。通过自注入锁定两个具有任意大频率间隔的独立激光器,同时锁定两个同族腔模式和一个耗散的Kerr孤子,这个多功能平台能够实现人们期待已久的现象,如带缺陷的DTCs和相变。结合单片精密微加工,这个室温系统为支持复杂实验室之外的真实世界应用的芯片级时间晶体铺平了道路。相关研究工作发表在《Nature Communications》上。(詹若男)

文章链接:
Hossein Taheri et al. All-optical dissipative discrete time crystals. Nature Communications (2022) 13:848
https://doi.org/10.1038/s41467-022-28462-x
3.拓扑保护的量子纠缠发射器
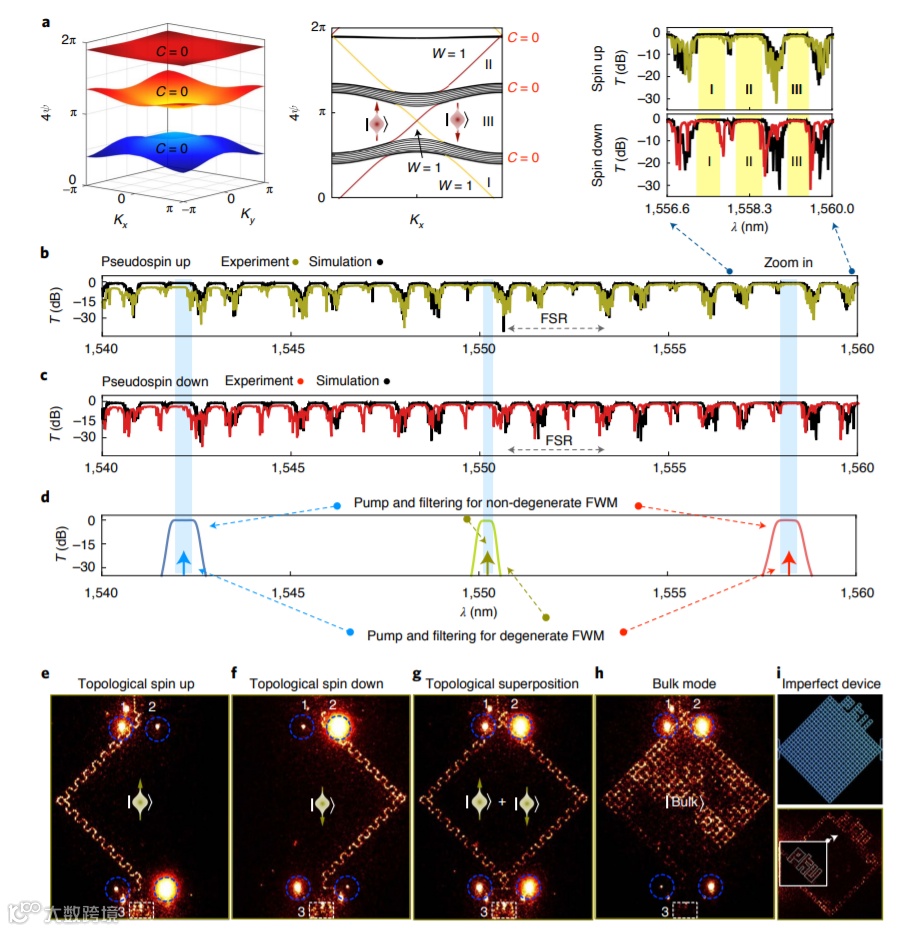
目前,量子力学在信息的处理、分析和安全性方面带来技术突破。纠缠和拓扑学是两种截然不同的量子特性,并且量子非局域关联的纠缠已成为量子信息的关键资源。例如,由几十个粒子组成的纠缠态,如光子、原子和超导量子比特,已可以实现量子计算和信息处理。此外,拓扑学对于描述物质的性质至关重要,例如波函数在整个能带结构上的全局不变量。在凝聚态物质以及光子、原子和声学系统中观察到了奇异的量子效应和拓扑相,有望开发出对杂质和无序免疫的新型拓扑器件。纠缠态的基本性质和量子系统的拓扑相位可以使它们以不同但互补的方式表现出来。例如,在噪声环境中,大纠缠态相对于退相干和保真度退化来说是脆弱的。因此,采用拓扑性质来防止纠缠不完美是非常有趣的。然而,产生拓扑保护的纠缠仍然具有很大的挑战性,尤其是在电子量子器件中,因为它需要复杂的量子器件,能够同时在强磁场中出现拓扑非平凡相,并在毫开尔文温度或超高真空中制备纠缠态。
近日,北京大学介观物理国家重点实验室的Xiaoyong Hu ,Qihuang Gong 和 Jianwei Wang以及中国科学院微电子研究所的Yan Yang联合研究团队通过实验演示了在一定条件下的金属-氧化物-半导体体系硅芯片中受拓扑保护的EPR(Einstein–Podolsky–Rosen)纠缠。该拓扑保护的量子纠缠发射器集成了所有光子组件,它们尺寸小巧、相位稳定、即插即用兼容,最重要的是对某些缺陷具有鲁棒性。在模拟的反常Floquet绝缘体晶格的反常拓扑边态上产生纠缠态,然后通过量子干涉和层析测量以及贝尔破坏进行了严格验证。他们通过观察德布罗意波长(是单光子的四分之一),在实验上证明了嵌入人工诱导结构缺陷的发射器中纠缠的拓扑保护,以及在拓扑边界上产生四光子(光子数)纠缠态。他们的拓扑量子器件具有集成拓扑光子和集成量子光子(高效光子对生成、精确量子操作和大规模量子集成)的优势,增强了光子量子信息的处理能力。相关研究发表在《Nature Photonics》上。(钟雨豪)
文章链接:
Dai, T., Ao, Y., Bao, J. et al. Topologically protected quantum entanglement emitters. Nat. Photon. (2022).
https://doi.org/10.1038/s41566-021-00944-2
4.波导耦合III-V光电二极管单片集成在硅上
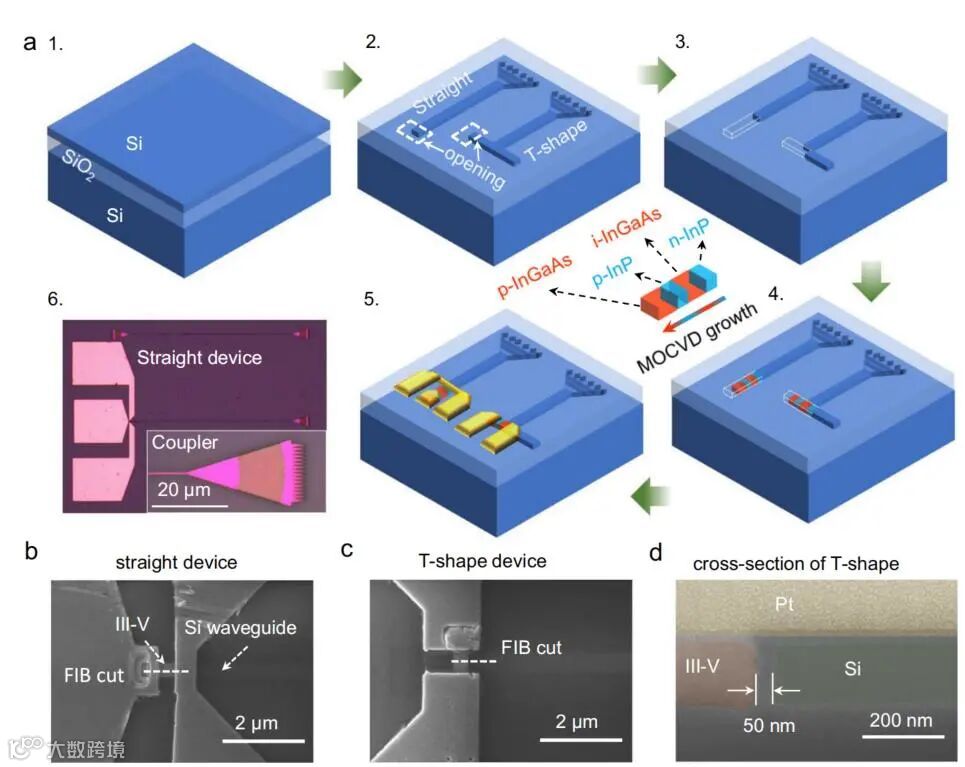
随着云计算、分析和存储系统等现代通信应用程序产生的数据量迅速增加,硅电子集成电路(ICs)正面临电阻互连导致的互连级瓶颈。电子是计算的理想选择,因为它们允许最终扩展的逻辑门,并且可以使用现代CMOS技术以大规模并行的方式进行集成。另一方面,光子是理想的传输方式,因为这可以在芯片大小的长度尺度上几乎无损地传输。因此,将电子学和光子学结合在一块硅芯片上是一个长期以来的目标,而光片上信号传输的有利距离也在慢慢减少,使片上光通信方案更接近。
III-V纳米结构在硅上的无缝集成是一个长期以来的目标,也是迈向集成光链路的重要一步。近日,IBM欧洲研究中心的Pengyan Wen等人研究演示了以1320nm为中心的光栅耦合器的波导耦合器件。作者研究了两种不同的器件架构。此外,还实现了一种双异质结构(n-InP/i-InGaAs/p-InP/p-InGaAs)来改善载流子约束。改进的静电性能使研究作为发光二极管(LED)操作时的发射特性。器件的热特性是影响其性能和可靠性评价的重要因素。作者们展示了第一个单片异质结构光探测器直接在平面内耦合到硅波导上,并展示了3dB频率为70GHz的高速性能。相关工作发表在《NATURE COMMUNICATIONS》上。(郑江坡)
文章链接:
https://doi.org/10.1038/s41467-022-28502-6
5.机械超材料的韧性
轻量、三维的微纳米晶格代表了一种很有前途的低密度材料(<100kg m-3),具有许多应用,如隔热、用作电池电极和能量吸收等。它们具有非凡的机械和功能性能,部分由母体材料和部分由其结构控制,因此通常被称为机械超材料。最近,增材制造技术,如投影微立体光刻技术和双光子光刻技术,使聚合物、金属和陶瓷超材料得以实现。这些材料的有效性能也被定义,它们的模量和压缩行为也被广泛报道。随着制造体量扩大,导致超材料需求的增长,评估它们对制造缺陷和损伤的容忍度是至关重要的。然而,对三维(3D)超材料的韧性的理解和测量仍然是难以捉摸的,部分原因是到目前为止还不能制造出足够数量的周期性元胞,从而能够产生所需的裂纹尖端的K场。
近日,剑桥大学工程系Vikram Sudhir Deshpande等人利用由数百万个结构单元组成的超材料试样进行实验,研究发现,不仅常规弹性断裂力学中使用的应力强度因子不足以表征断裂,而且常规断裂测试方案也不充分。通过结合数值分析和渐近分析,研究人员将弹性断裂力学的思想扩展到基于桁架的超材料,并开发了一个通用的测试和设计协议。研究结果修正了弹性材料断裂的基本概念,从而建立了超材料断裂的基本规律。这个框架可以作为其他离散的弹性脆固体的断裂表征的基础,在这些固体中断裂韧性的概念已经被打破。相关研究工作发表在《Nature materials》上。(丁雷)

文章链接:
Angkur Jyoti Dipanka Shaikeea et al, The toughness of mechanical metamaterials, Nature materials(2021).
https://doi.org/10.1038/s41563-021-01182-1.
6.用于形状变形的微尺度拉胀层级力学超构材料
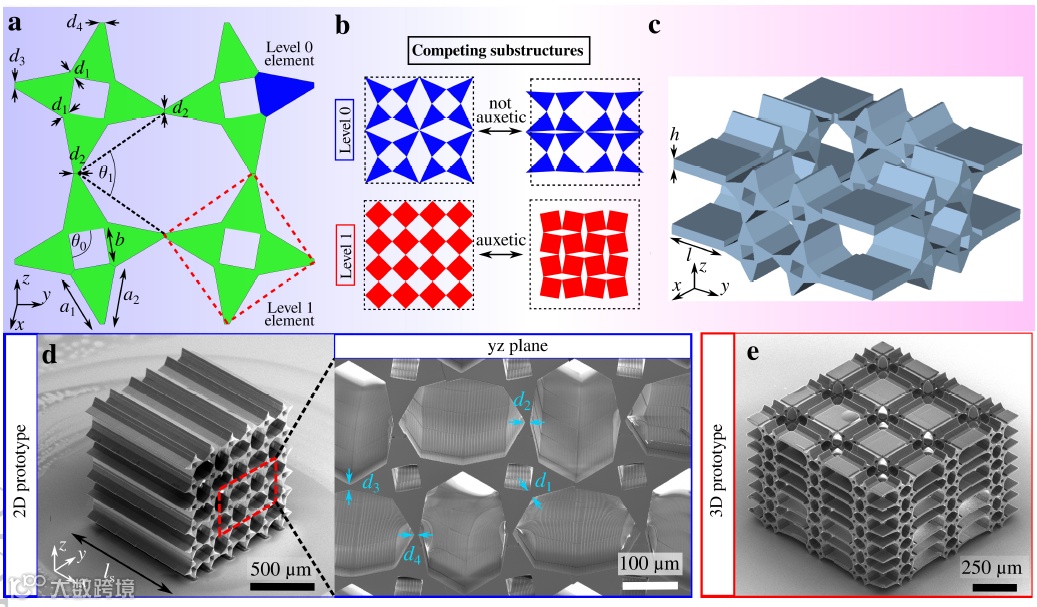
形状变形、利用拓扑或时空特性以及控制功能材料力学特性的能力仍然是材料科学的一些主要挑战。同时,对有这种特性的材料的需求很高,因为其性能优于目前已知的生物医学和其他领域器件性能。此外,设计和制造这种材料在小尺度上变得更加困难。与该课题相关的最有趣的研究方向之一是力学超构材料。然而,在绝大多数情况下,标准力学超构材料在寻找能够表现出多种变形模式的结构时被证明是不够的。这反过来导致了致力于层级力学超构材料的深入研究,即由具有自己几何形状的元素组成的结构,这些几何形状通常可以变形而与系统的其余部分无关。层级力学超构材料的研究大受欢迎,它是力学超构材料领域相对较新的研究方向。然而,目前提出的层级结构通常有几个局限性:大多数的层级力学超构材料的设计产生的提升性能相对较小;它们展示可调力学行为的能力只能在宏观结构上得到证实;许多应用中(如生物医学器件和柔性电子),表现出可编程拉胀行为能力材料在微纳尺度上非常重要;几乎所有报道的层级超构材料都是2D的,这降低了适用性。因此,设计能够对多个方向的力学性能进行可编程控制的3D层级超构材料的可能性将具有重要意义。
近日,法国FEMTO-ST研究所M. Kadic提出了新颖的2D和3D微尺度层级力学超构材料。此外,通过有限元法模拟支持的实验,证明了所考虑的结构能够在改变连接其结构元件的铰链的厚度时表现出可控的拉胀行为。在这方面,由于非常新颖的设计导致系统内存在相互竞争的子结构,表明分析的模型可能表现出非常广泛的拉胀行为,这反过来又增加了其适用性和吸引力材料科学领域的研究人员。最后,表明分析的力学超构材料可能表现出预定义的形状变形。换句话说,由于其层级设计,所考虑的力学超构材料可以改变其形状,以便在受到外部刺激时与另一个物体的形状相匹配。相关研究发表在《Advanced Materials》上。(徐锐)
文章链接:
K. K. Dudek, J. A. I. Martínez, G. Ulliac, et al. Micro‐Scale Auxetic Hierarchical Mechanical Metamaterials for Shape Morphing. Advanced Materials, 2022.
https://d
oi.org/10.1002/adma.202110115
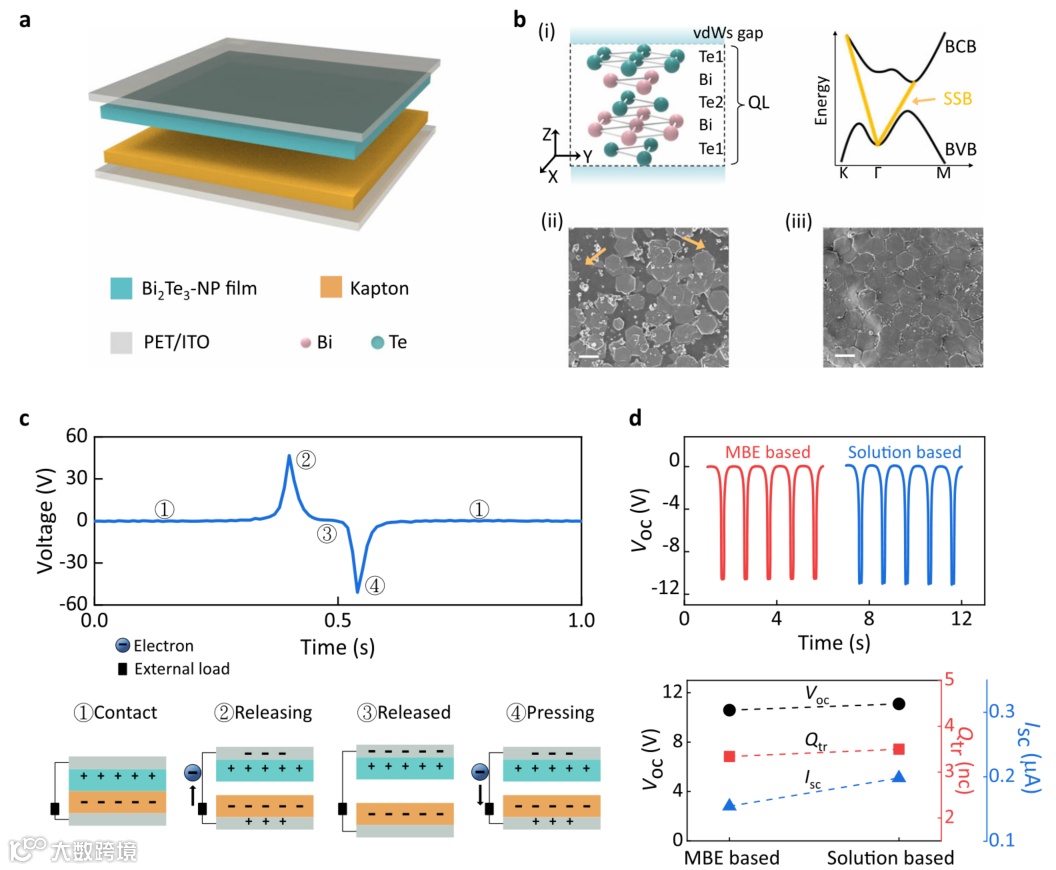
7.填补拓扑绝缘体纳米材料与摩擦电纳米发电机之间的空白
可靠的能源模块和更高灵敏度、更高密度、更低功率的传感系统是可穿戴电子产品和物联网技术不断发展的要求。摩擦电纳米发电机作为一项新兴技术,有可能引领可持续动力单元和节能传感器的发展。然而,现有的摩擦电传感系列主要由聚合物和橡胶组成,由于其表面电子结构的刚性,在一定程度上限制了摩擦电传感的可塑性。
近日,来自国立中兴大学材料科学与工程学系、物理系和南加州大学谢明电子与计算机工程系的Mengjiao Li等人为了丰富现有的摩擦电基团,利用开尔文探针力显微镜研究了拓扑绝缘体纳米膜的摩擦电特性,揭示了其相对积极的带电充电性能。较大的表面电位差和纳米膜的导电表面状态协同改善了所选摩擦电介质之间的电荷转移行为,使基于拓扑绝缘体的摩擦电纳米发电机表现出了可观的输出性能。除了作为可穿戴电源外,该超紧凑设备阵列还展示了创新的系统级传感能力,包括动态物体的精确监测和人机界面的实时信号控制。这项工作填补了拓扑量子物质和摩擦电纳米发电机之间的空白,更重要的是,开发了拓扑绝缘体纳米膜在自供电柔性/可穿戴电子技术和可扩展传感技术中的巨大潜力。相关研究工作发表在《Nature Communications》上。(詹若男)
文章链接:
Mengjiao Li et al. Filling the gap between topological insulator nanomaterials and triboelectric nanogenerators. Nature Communications (2022) 13:938
https://doi.org/10.1038/s41467-022-28575-3
8.用于软体机器人的双稳态和多稳态执行器:结构、材料和功能
软体机器人以独特的连续性、柔顺性和适应性提供了传统刚性机器人无法实现的一系列新功能。作为软体机器人的关键要素之一,软执行器驱动软体的变形和运动,以实现丰富的机器人功能。软驱动材料可以响应不同的驱动输入,通过膨胀、收缩、弯曲、扭曲或组合变形为不同的目标形状,包括气动/液压加压、温度、溶剂、水分、光、电和磁场。这些材料可以进一步与丰富的结构设计集成以扩展和增强机器人性能,包括双层结构、纤维增强结构、柔性力学超构材料、张拉整体结构、折纸/剪纸结构和双稳态结构。在这些不同的结构设计中,双稳态结构由于拥有两个稳定的平衡状态而与众不同,这与大多数其他结构稳定设计中的单一稳定状态相反。自然界中经常可以观察到突弹跳变的双稳态(如捕蝇草的快速捕捉)和我们的生活中的实例(如瓶盖和理发剪)。这些双稳态和多稳态结构(即具有两种以上稳定构型的结构)已在微机电系统(MEMS)、能量收集系统、变形结构、超构材料中有着广泛的应用。尽管软体机器人的软执行器在结构设计或材料驱动或机器人应用方面有了进展和最近的评论,但为软体机器人创建软执行器需要综合结构设计、软材料、变形驱动和控制等方面的努力,以满足机器人的需要。特别是,对于软体机器人中使用的不同双稳态和多稳态结构,缺少重要的力学引导设计原则。还缺乏关于如何在不同驱动下将双稳态和多稳态结构与软材料集成以实现目标机器人功能的路线图。
近日,北卡罗来纳州立大学Jie Yin副教授综述了将双稳态和多稳态结构与软驱动材料相结合用于各种软驱动机构和软/柔性机器人的研究进展。首先介绍了从1D到3D的五类基本双稳态元件(即约束梁、弯曲板、圆顶壳、具有柔性铰链和可变形折纸的柔性连杆机构以及气球结构)的力学引导结构设计原则,同时简要讨论了这些具有代表性的软驱动材料的优缺点,包括流体弹性体和刺激响应聚合物,例如电活性聚合物、形状记忆聚合物(SMP)、液晶(LC)聚合物、水凝胶、磁响应弹性体和扭转人造肌肉(TAM)。随后,讨论了将这些软材料与用于软双稳态和多稳态执行器的各类双稳态元件及其各种机器人应用相结合。最后,对这一新兴领域的挑战和机遇进行了展望。相关研究发表在《Advanced Materials》上。(徐锐)

文章链接:
Y. Chi, Y. Li, Y. Zhao, et al. Bistable and Multistable Actuators for Soft Robots: Structures, Materials, and Functionalities. Advanced Materials, 2022.
https://doi.org/10.1002/adma.202110384
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理(按照法规支付稿费或立即删除),所有来稿文责自负,两江仅作分享平台。转载请注明出处,如原创内容转载需授权,请联系下方微信号。
