


今天我们继续为大家带来本周的超材料前沿研究精选,内容涉及任意可配置的非线性拓扑模式,三维谷差异声学,具有可编程多稳态和多跃迁行为集成功能的组装力学超构材料等,敬请期待!
索引:
1 任意可配置的非线性拓扑模式
2 通量修饰石墨烯类光子晶格中的紧凑拓扑边界态
3 杂化超晶格等离子体增强的 GaSb 基带间级联激光器
4 三维谷差异声学
5 具有增强耦合特性的低频吸声材料的设计与制造
6 可电子配置的微型超薄片机器人
7 具有可编程多稳态和多跃迁行为集成功能的组装力学超构材料
拓扑物质的概念在凝聚态、光子学、电路和声学等各个领域蓬勃发展。正如传统的体-边界对应关系所描述的那样,拓扑非平庸的体可以产生局域在边界、界面和位错的拓扑模式(TMs)。这些TMs对无序和缺陷产生的背向散射具有鲁棒性。但是受限于体-边对应关系,TMs局域在边界并向体区域呈指数衰减,因此容量有限。对拓扑材料庞大的体积要求和有限的可用容量是潜在应用的瓶颈。最近,非厄米趋肤效应和虚规范场已经被用来使TMs去定域。其中,非互易耦合将TMs调整为完全扩展模式。
近日,武汉大学肖孟教授课题组探讨了非线性在设计和配置波函数中的能力。所提出的系统由拓扑非平庸的线性晶格和具有非线性耦合的一维晶格构成。在低强度区域(非线性可以忽略不计),非线性链为拓扑平庸,支持局域在界面上的拓扑零模(TZM)。随着波函数强度的增加,TZM的轮廓在非线性晶格上发生变形,并脱离指数衰减的行为。当强度高于一定的阈值时,TZM合并成一个任意可设计的平台,逐渐覆盖整个非线性晶格区域。有趣的是,这种扩展的非线性TMs对缺陷和无序仍然具有鲁棒性,并且在外部激励下的动力学演化中保持稳定。随着对非线性TMs概念的理解和发展,该研究为增加TMs的容量和开发紧凑且可配置的拓扑设备开辟了新的途径。相关内容发表于《PHYSICAL REVIEW LETTERS》上。(金梦成)

文章链接:
https://doi.org/10.1103/PhysRevLett.133.116602
2 通量修饰石墨烯类光子晶格中的紧凑拓扑边界态
随着人们有可能在经济实惠的光学实验(尤其是光子晶格)中研究此类材料,对在适宜工作温度下具有超导特性的材料的探索获得了新的动力。与传统的 BardeenCooper-Schrieffer 理论不同,有人假设电子在无色散能带周围配对会导致超导,临界温度与电子相互作用强度成线性比例。然而,无色散平带 (FB) 可以将能量存储在边界、表面或界面等受限的模式中,因此对环境影响和制造误差高度敏感。另一方面,可以通过 Aharonov-Bohm 笼罩和拓扑保护之间的相互作用来增强稳定性,例如在 Creutz 类阶梯中实现的相互作用。然而,FB 的 k 独立性不允许确定拓扑不变量,无论是基于 Berry 曲率直接确定,还是基于与 Su-Schrieffer-Heeger (SSH) 模型的类比间接确定。所有这些都使得设计具有 FB 光谱的超稳健边界态变得具有挑战性。
近日,罗斯托克大学的Gabriel Cáceres-Aravena等人,报告了在通量修饰的光子石墨烯带上存在紧凑的拓扑边界态。研究人员发现,通过 Aharonov-Bohm 笼罩和拓扑保护机制的协同作用,可以实现稳健的局域化。紧凑边界态的拓扑非平凡性是通过理论推导和从平均手性位移获得的整数 Zak 相的实验观察来表征的。实验是使用直接激光写入具有 0 或 π 有效磁通量的石墨烯带光子晶格进行的。模式稳定性由边界紧凑模式的出色局域化及其对制造公差和输入相位偏差的弹性来证明。研究结果表明,完美紧凑的拓扑边界态是存在的,这是平带物理和拓扑之间协同作用的一个具体且有希望的例子。相关工作发表在《Physical Review Letters》上。(刘帅)

文章链接:
https://doi.org/10.1103/PhysRevLett.133.116304
3 杂化超晶格等离子体增强的 GaSb 基带间级联激光器
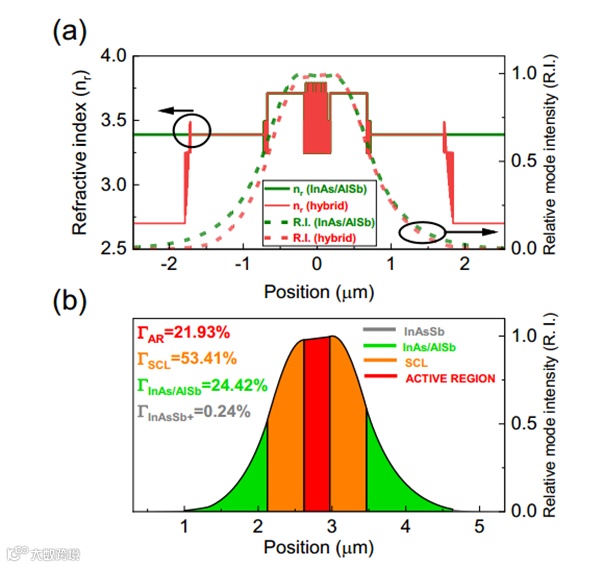
该篇论文提出了一种发射波长为5.2μm的带间级联激光器(ICL),该激光器由8级有源区和由外等离子体增强InAs0.915Sb0.085和内InAs/AlSb超晶格混合组成。模拟结果表明,混合结构使有源区的模提高了约11.2%。这是等离子体增强折射率显著降低的结果。室温下脉冲工作的阈值电流密度为242A/cm2。这是迄今为止报道的波长大于5μm的ICLs的最低值。研究团队还报告了在这种波长下ICLs的阈值功率密度接近记录值840 W/cm2。
近期,德国维尔茨堡大学B. Petrović和F. Hartmann研究团队报道了上述这种工作波长为5.2μm的8 级带间级联激光器。带间级联激光器(ICLs)是重要的相干中红外光源,有工业过程控制、医疗诊断、红外场景投影和防御等多种应用。继承其级联方案的一个注入电子-空穴对的多光子产生了低阈值电流密度和高电压效率,使ICL成为有吸引力的便携式使用设备。特别是在3-6 µm波长范围内,ICLs的阈值电流和功率密度低于二极管激光器或量子级联激光器。相关研究成果以“GaSb-based interband cascade laser with hybrid superlattice plasmon-enhanced claddings”为题发表在《Applied Physics Letters》上。(郑佳慧)
文章链接:
DOI: 10.1063/5.0217972
4 三维谷差异声学
自旋和谷是晶体中电子的两种基本性质。几十年前,石墨烯等二维材料中的谷差异物理已得到深入研究,并揭示了自旋与谷的相似性。在反演对称性破缺的条件下,石墨烯的两个谷展现出相反的轨道磁矩,类似于电子自旋1/2的行为,其Berry曲率相反,具有半个拓扑荷。谷差异效应的研究起源于二维晶体,并主要集中在二维系统,但其核心概念——动量空间中不同点能带几何性质的显著差异——并不局限于二维。
近日,香港中文大学副教授薛昊冉与江苏大学教授孙宏祥、副教授葛勇团队,以及新加坡南洋理工大学张柏乐教授团队和Yidong Chong教授团队,设计并实现了一种具有谷差异物理特性的三维声子晶体,将谷的概念从二维推广到了三维。这种声子晶体的显著特征在于其能带几何性质展现出三维矢量特性。不同于二维石墨烯晶格中的两个谷,该三维晶格拥有六个谷,分为三对,每对谷的Berry曲率和轨道磁矩具有的不同的轴指向,且在同一对谷内呈现相反的值。每个谷处的Berry曲率积分保持量子化的半陈数,具有三维矢量形式。三维谷态展示了与二维情况本质上不同的特征。在晶体内部,这些谷态形成沿三维不同方向的涡旋,而不像二维谷态仅能沿顺时针或逆时针方向旋转。在具有相反有效质量带隙的两个三维谷声子晶体的二维界面上,产生了鲁棒的定向谷扭结态,这是二维谷材料中一维边界扭结态的拓展。这项研究提供了新颖的声波操控方式,并可能在拓扑波导、腔体及天线等应用中具有潜力。同时,谷态携带的轨道磁矩可用于控制光或声波的轨道角动量,在光/声镊或通信信道等领域具有潜在应用。该研究也为在现实材料中实现三维谷霍尔效应和三维谷电子学提供了重要指导。相关研究已发表于《Science Advances》上。(刘磊)

文章链接:
https://doi.org/10.1126/sciadv.adp0377
5 具有增强耦合特性的低频吸声材料的设计与制造
传统声学材料受制于质量定律,在处理低频噪音时往往存在着尺寸或质量过大等诸多问题。随着声学超材料的出现,针对小尺寸调控大波长的声学问题有了新的解决方案。该材料不仅拥有负等效质量、负等效模量等传统材料不具备的物理性质,通过共振结构的精确设计,还能实现声学性能的改善及工作频段的有效调控,为其可编程性提供了基础。然而,理论模型天然的近似性以及仿真计算的高消耗使得材料的性能预测与设计较为低效。因此,借助机器学习强大的数据挖掘与非线性拟合能力辅助材料设计正成为当下的趋势。
近日,西安交通大学梁庆宣教授团队结合阻抗理论与神经网络对泪滴状孔径的突变蜂窝结构展开了精准且高效的低频吸声设计研究。文章提出了一种单元阻抗校正方法,通过计算理论与仿真之间的阻抗误差进而实现了理论值与仿真值的高度吻合,极大地提高了阻抗预测效率。考虑到阻抗理论忽略了单元结构间的耦合效应,因此针对孔径距离及单元排列方式进行了探讨,并发现相对较近的孔径距离和最高共振频率单元中间布置的方式能够显著增强整体结构的低频吸声性能。为了验证单元阻抗校正设计方法的有效性,利用模式搜索算法完成了50mm厚度条件下工作频段为223-504 Hz的吸声结构设计,实验结果与预测结果展现了高度的一致性。该方法为快速准确地设计低频宽带吸声材料提供了新思路。相关工作发表于《Virtual and Physical Prototyping》上。(潘鑫荣)

文章链接:
https://doi.org/10.1080/17452759.2024.2383297
6 可电子配置的微型超薄片机器人
构建具有非凡变形和运动策略的微型机器人需要开发新的平台。最近,在开发通过操纵表面的局部膨胀或收缩来改变形状的响应性材料方面具有很大进展。例如,水凝胶、响应性聚合物和液晶弹性体,它们对温度、pH、光和磁场等刺激作出反应。虽然这些材料的变形能力很有前景,但将它们与电子设备集成以进行本地机载控制仍然具有挑战性。另一项有前途的技术是电化学致动器,它被用于构建电子集成的微型机器人、机器人纤毛超表面和自折叠折纸。然而,由这些致动器构建的设备通常具有有限的自由度,并且只能采用小范围的形状构象。实现更大形状灵活性的一个可能解决方案是使用此类致动器构建主动机械超材料。
近日,康奈尔大学的Itai Cohen团队,设计和制造一种微型超薄片机器人,这种机器人可以采用多种形状,并通过对不同区域进行单独驱动来实现运动。虽然同时驱动多个铰链已经能够实现令人着迷的运动过程,但进一步控制单个铰链将释放这种超材料机器人的全部潜力。这种超薄机器人可以爬到所需的位置并采用适当的构型,从而增强与生物组织和器官等的交互和感知。值得注意的是,最近有研究表明,驱动超薄机器人形状变形的电化学驱动铰链可以与互补金属氧化物半导体 (CMOS) 电子器件交互。将这种电路集成到超薄机器人中将允许更大的局部控制,并为微尺度分布式机器人打开大门。构建带有机载集成电路的超机器人将允许创建不受束缚的机器人,这些机器人可以根据外部光学或射频命令改变其行为。此类能力将大大扩展超机器人可以发挥作用的环境范围。结合机载电子设备的超材料板可以构建一种称为弹性超材料的新物质形式,其响应速度可能比声速还快。这些机器人材料还能够以新的方式对流体流动、固体环境等做出反应,此类能力将大大扩展微尺度机器人的前沿。相关工作发表在《Nature Materials》上。(刘帅)

文章链接:
https://doi.org/10.1038/s41563-024-02007-7
7 具有可编程多稳态和多跃迁行为集成功能的组装力学超构材料
多稳态力学超构材料已被广泛应用于形状重构、机械信号传播/控制和能量吸收等领域。在变形过程中它们能达到局部势能最小值,并能迅速跳跃到其他稳定状态,从而获得这种特性。目前对状态转换行为的研究十分有限,通过利用稳定状态转换的设计空间,可以获得同时具有一系列前所未有的状态转换行为的多稳态力学超构材料。目前的多稳态设计主要基于斜梁和曲梁、穹顶和壳体以及折纸和剪纸等结构形式。它们的力学行为主要通过结构设计或集成刺激响应材料来调节,这只能改变整个应力-应变曲线,而无法解决与稳定状态转换相关的局部力学行为的可调性问题。装配式超构材料代表了数字材料开发的一种新模式,在这种模式中,可以对有限的模块单元进行架构,以实现可扩展性和创新功能。
近日,南方科技大学熊异教授联合华中科技大学夏凉教授报告了一类新型力学超构材料,它具有可编程多稳态性和面向功能的多过渡行为。这种集成是通过一种新颖的基于组装的设计理念实现的,它将可互换的接触块(CB)单元融入经典的双稳态结构中。通过改变CB单元的位置、数量和形状,可以获得一系列面向功能的转换行为,并通过单元更换提供可重构性。为了确保CB的合理设计,采用了一种结合理论分析、数值模拟和实验验证的综合方法来研究这些组装超构材料的非线性行为,包括突弹跳变不稳定性和接触行为。此外,文章还探索了2D阵列和3D扩展等设计策略,以实现可编程多稳态性。还通过构建具有可扩展性、可重构性和多方向性的数字材料,展示了这些组装力学超构材料的多功能性。所提出的基于组装的设计理念为可展开结构、机器人及其他领域具有集成功能的多稳态结构工程开辟了新天地。相关研究发表在《Materials Horizons》上。(徐锐)

文章链接:
J. He, Y. Wang, Z. Shen, et al. Assembled mechanical metamaterials with integrated functionalities of programmable multistability and multitransition behaviors[J]. Materials Horizons, 2024.
https://doi.org/10.1039/D4MH00906A
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理,所有来稿文责自负,两江仅作分享平台。转载请注明出处,如原创内容转载需授权,请联系下方微信号。
