


今天我们继续为大家带来本周的超材料前沿研究精选,内容涉及基于光子晶体和深度学习的多相流检测, 三维声学拓扑绝缘体中的拓扑位错模式,集成超构材料的3D打印模块化软夹持器等敬请期待!
索引:
1.基于光子晶体和深度学习的多相流检测
2.三维声学拓扑绝缘体中的拓扑位错模式
3.半磁性拓扑绝缘体奇偶异常的实验特征
4.利用超表面拦截平面电子束的相干太赫兹辐射
5.集成超构材料的3D打印模块化软夹持器
1.基于光子晶体和深度学习的多相流检测
光子晶体(PC)由介电性能对比的完美空间阵列组成,这些阵列控制着光或电磁辐射的传输,这些结构允许特定的波传播模式。因此,出现了一种频带结构,它由勾勒出禁止模态的阻带组成。由于这种行为,PC能够适应大量的环境传感应用,这些应用将光子带结构的变化与系统特定数量的变化联系起来,如浓度或物种检测。多相流测量(MPFM)包含一组技术来推断流动特征,如相占比、流速和流动形态。确定这些流动特性的传统技术实施起来很麻烦,容易结垢和出错,而且需要定期校准。
近日,来自美国ExxonMobil研究与工程公司的Lang Feng等人展示了一个基于物理的新概念,并通过实验室和现场原型测试,利用光子晶体对多相流进行实时表征。特别是,低功率(~1 mW)微波在充满流体混合物的光子晶体中的传输,可以通过深度学习分析技术来提供快速和准确的相占比和流动形态表征。此外,当这些流动特性已知时,流量可以准确地从流量通过光子晶体所必需的压差推断出来。这种方式为开发一种独特的廉价、准确和方便的技术来描述多相流提供了基础。相关研究工作发表在《Nature Communications》上。(詹若男)

文章链接:Lang Feng et al. Multiphase flow detection with photonic crystals and deep learning. Nature Communications (2022) 13:567
https://doi.org/10.1038/s41467-022-28174-2
2.三维声学拓扑绝缘体中的拓扑位错模式
位错在三维固态材料中普遍存在。实空间拓扑与互反空间中定义的emergent band topology相互作用,产生了线缺陷约束下的无间隙螺旋模。这被称为体-位错对应,与传统的体-边界对应不同,体-边界对应具有边界上的拓扑状态。然而,由于在创建可控位错和最终识别拓扑信号方面存在巨大的挑战,迄今为止,对于固态系统中这种有趣的拓扑观测,很少有令人信服的实验证据。
近日,来自武汉大学人工微纳结构教育部重点实验室、物理与技术学院的Liping Ye等人利用具有精确可控位错的三维声学弱拓扑绝缘体,通过直接测量一维拓扑位错模的无间隙色散,获得了长期期望的体-位错对应的明确的实验证据。值得注意的是,他们在进一步的实验中发现,赝自旋锁定位错模式可以被单向引导到任意形状的位错路径中。在各种经典波系中所期望的特殊的拓扑位错输运,可以为波的传播提供前所未有的控制。相关研究工作发表在《Nature Communications》上。(詹若男)

文章链接:
Liping Ye et al. Topological dislocation modes in three-dimensional acoustic topological insulators. Nature Communications (2022) 13:508
https://doi.org/10.1038/s41467-022-28182-2
3.半磁性拓扑绝缘体奇偶异常的实验特征
二维(2D)系统中的狄拉克费米子,其特征是一个线性色散电子带,称为无质量狄拉克锥,具有自旋动量锁定和零能量交叉点(狄拉克点),当时间反演对称性被破坏时,能量隙在狄拉克点打开。在高能物理学中,在(2+1)-D(时空)量子场论中,一种类似的现象被称为宇称异常,其中耦合到U(1)规范电磁场的无质量狄拉克费米子的规范不变正则化过程(Pauli–Villars正则化)不可避免地破坏了宇称对称性。奇偶异常的一个显著后果是,在电磁场扰动下,产生了具有半整数量化霍尔电导e2/(2h)的奇偶反电流,其中e是基本电荷,h是普朗克常数。然而,根据尼尔森-尼诺米亚的费米子倍增理论,狄拉克锥总是成对出现,成对的狄拉克锥抵消了奇偶异常,恢复了整个系统的奇偶对称性。因此,迄今为止报道的量子化现象,如量子霍尔效应和量子化磁光效应,以整数拓扑指数为特征。同时,霍尔丹在蜂窝晶格中提出了凝聚态物质实现与两个狄拉克锥有关的宇称异常的可能性,并在冷原子系统中实现了这种可能性。然而,霍尔电导的单狄拉克锥和半整数量子化仍然难以实现。
近日,东京大学应用物理和量子相位电子学中心(QPEC)的Y. Tokura和麻省理工学院物理系的M. Mogi联合研究团队用两种不同的方法太赫兹磁光光谱和输运测量,在半磁性拓扑绝缘体中用霍尔电导的半整数量子化实验证明了宇称异常。虽然太赫兹光谱的精度不如直流传输测量的精度高,但磁光旋转直接反映霍尔电导率,而直流传输测量需要使用明确定义的样品形状进行电阻-电导转换。他们制作的霍尔棒样品能够实现高度精确的测量,得到了与太赫兹测量一致的数据,通过双重测量相互补充,证实了宇称异常。具有宇称异常的半磁性拓扑绝缘体结构可以作为奇异单狄拉克费米子物理的平台。例如,二元粒子产生于磁隙(顶部)表面上的分数拓扑磁电效应。此外,在无间隙(底部)表面上附加的超导接近耦合可以打开超导间隙,这可能在磁隙和超导间隙的宽松条件下产生更易接近的非阿贝尔Majorana边界态。相关研究工作发表在《Nature Physics》上。(钟雨豪)

文章链接:
Mogi, M., Okamura, Y., Kawamura, M. et al. Experimental signature of the parity anomaly in a semi-magnetic topological insulator. Nat. Phys. (2022). https://doi.org/10.1038/s41567-021-01490-y
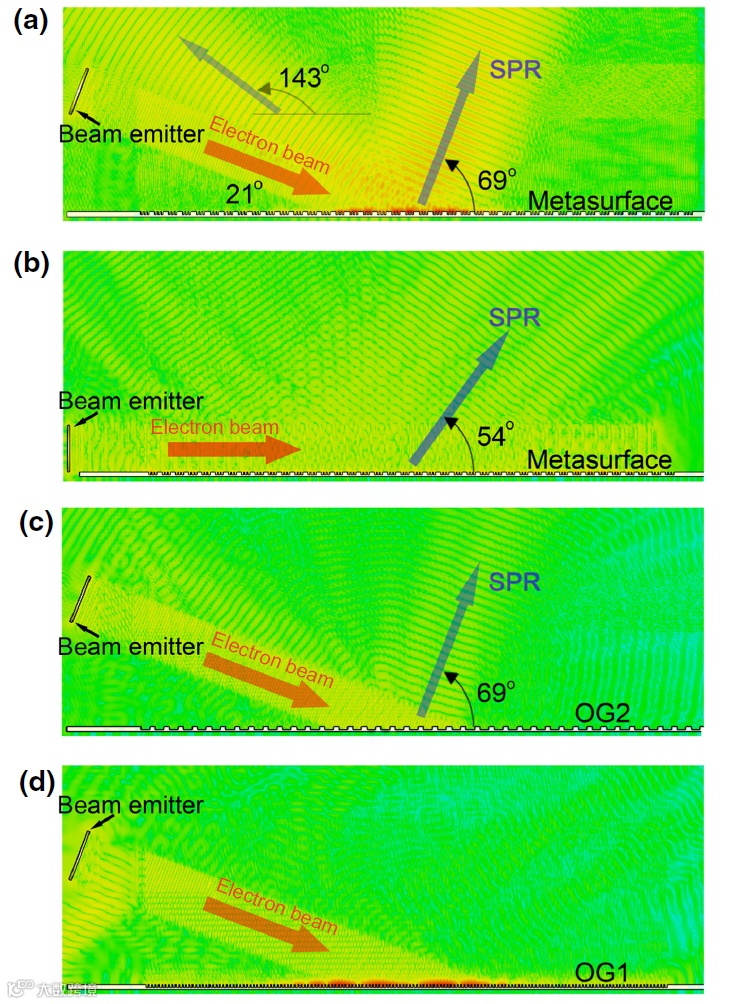
4.利用超表面拦截平面电子束的相干太赫兹辐射
电子束与金属或电介质表面的相互作用是电磁学的一个基础研究课题。它是众所周知的跃迁辐射(TR)和衍射辐射(DR)的基础,通过提供产生电磁辐射和光束诊断的强大工具,它们在当今科学和技术中有着广泛的应用。在这些类型的辐射中,史密斯-珀塞尔辐射(Smith-Purcell Radiation,SPR)是一种使用电子束与周期性表面相互作用获得的相干DR,它是一种产生太赫兹波的有效方法,具有多种应用前景。然而,在传统的TR和SPR方案中,板波相互作用的效率基本上受到电子束感应场衰减长度的限制,可以用公式βγλ/4π表示,其中λ是辐射的波长,β和γ是运动电子的相对论因子。对于TR,只有在表面拦截点周围衰减长度内的指定点才能激发辐射。对于SPR,只有距离辐射器表面小于衰变长度的电子才能激发辐射。实际上,由于空间电荷效应,能量相对较低的电子束(由于其小型化和低成本)通常具有相对较大的横截面,因此,电子束中的大部分电子超出了衰变长度,无法有效地与辐射器表面相互作用。
近日,中国科学技术大学国家同步辐射实验室的Hongliang Xu和南京航空航天大学电子信息工程学院的Weihao Liu以及上海交通大学激光等离子体教育部重点实验室的Shengguang Liu研究团队提出并研究了一种增强相干太赫兹波产生方案,该方案使用由类法布里-珀罗共振模式阵列形成的超表面来斜截获具有大截面的低能平坦电子束。我们证明,该机制是史密斯-珀塞尔辐射的一种改进形式,而不是预期的跃迁辐射。该方案克服了衰减长度的限制,利用类法布里-珀罗腔大大提高了辐射强度,它为开发小尺寸的高功率太赫兹源提供了一个很好的选择。相关研究成果发表在杂志《Physical Review Applied》上。(钟雨豪)
文章链接:
https://doi.org/10.1103/PhysRevApplied.17.014038
5.集成超构材料的3D打印模块化软夹持器
受大自然启发(如象鼻、章鱼臂、蠕虫和毛毛虫等),低弹性模量材料和智能结构使软体机器人能够通过机械方式(大变形)使其身体适应动态环境来执行任务。与传统的刚性机器人相比,软体机器人的特点是适应性、柔顺性、敏捷性和耐用性。传统的机器人抓手已被广泛应用于重复性任务,然而,传统的夹持器由坚硬的材料和刚性部件组成,不适合与人类一起安全操作以及在非结构化和动态环境中安全操作。传统夹具的制造需要复杂的加工和费力的装配过程。此外,需要多个传感器和复杂的控制算法,以确保有足够但不会过度的抓取力,防止损坏被抓取的物体。由高度可变形和柔顺的材料和结构制成的软抓手是处理和操纵精细物体的完美选择。首先,这些软夹具可以使用低成本和市售的软材料制作。其次,由于接触力大大降低,它们可以处理具有不同刚度的各种物体,而无需任何感官反馈和控制系统。最后,由于其固有的柔软性,它们可以在动态环境中与人类一起安全操作。对于软夹持器和硬夹持器来说,开发能够拾取任意物体的通用夹持器仍然是一个挑战。为了在静态和动态条件下实现稳定的抓握,需要在被处理的物体和抓握器之间有较大的接触面积。
近日,澳大利亚伍伦贡大学Gursel Alici团队研制了一种由压力软气动执行器和力学超构材料组成的高保形3D打印模块化软夹持器。该软夹持器集成了软拉胀结构和软力学超构材料,使用热塑性聚氨酯(TPU)打印材料,一步完成3D打印,无需支撑材料和后处理。使用有限元建模(FEM)对夹具的软手指进行了优化。有限元模拟准确地预测了抓手在变形和尖端力方面的行为和性能。此外,利用有限元法预测力学超构材料的接触行为,证明它通过增加柔软手指与被抓物体之间的接触面积来大大降低接触压力,从而证明其在提高抓手抓握性能方面的有效性。采用力学超构材料后,接触压力可降低8.5倍。高度共形夹持器的配置可以通过改变固定在其底座上的手指数量来轻松调整,以适应特定的操作任务。通过2D和3D抓取实验,评估软模块化夹持器的抓取性能,并证明超构材料的加入增加了其顺应性并减少了软单片手指在抓取时的平面外变形不同的物体,因此,导致夹持器具有三种不同的配置,包括两指、三指和四指配置,成功地抓住了各种各样的物体。相关研究发表在《Frontiers in Robotics and AI》上。(徐锐)

文章链接:
C. Tawk, R. Mutlu, G. Alici. A 3D Printed Modular Soft Gripper Integrated With Metamaterials for Conformal Grasping[J]. Frontiers in Robotics and AI, 2022, 8.
https://doi.org/10.3389/frobt.2021.799230
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理(按照法规支付稿费或立即删除),所有来稿文责自负,两江仅作分享平台。转载请注明出处,如原创内容转载需授权,请联系下方微信号。
