



撰稿|由课题组供稿
新兴的超材料通过结构化的热物性调控,实现了超常规的热传输和热管理,并且出现了许多基于超材料的热功能元件。尽管多功能和相变热超材料能够实现有限的热功能之间的切换,但由于固定的人工结构和不可控的相变,传统的热超材料面临着功能单一、环境适应性弱等问题,无法实现动态的热管理。近日,西安交通大学屈治国教授课题组和新加坡国立大学仇成伟教授课题组合作,基于Peltier效应,构建了自适应可编程热超表面平台,通过热电元件矩阵的空间演化和反馈控制系统的实时响应,实现了集成化的热调控功能以及对应用环境的主动适应。相关成果以《Real-timeself-adaptive thermal metasurface》为题,发表于《Advanced Materials》。
https://doi.org/10.1002/adma.202201093
超材料具有特殊的人工结构,在物理场调控方面发挥了重要作用。其中,具有可调特性的动态超材料可以用来制备具有可重构和可编程功能的元器件。热学超材料在高效调控热流传输方面具有潜在应用。然而,传统的热超材料由于固定的人工结构以及不可控的相变,无法实现热场的动态调控。此外,无论是基于变换光学还是散射相消的热斗蓬,其内边界的径向热导率均为0。也就是说,具有内热源的被隐物体(如人体,发动机等)将会由于自发热效应而损坏。考虑到能量守恒,针对此类被隐物体,需要在超材料中引入有源手段。
本研究利用有源矩阵构建了自适应可编程的超表面平台,实现了动态的热调控。该平台将有源矩阵和控制系统集成到一个与计算机串口相连的印刷电路板(PCB)中。有源矩阵由热电元件(TEC)组成,每个TEC可被视为一个热像素,驱动电压通过自适应时间演化过程进行动态调节。通过内置算法对每个热像元的热源强度进行空间演化,形成精细的热像图,从而精确控制局部热传输。该超表面可实现面内/面外热隐身和热幻觉功能的切换。

图1 热超表面平台原理示意图
如图1所示,有源矩阵由10×10的定制TEC组成,每个TEC含有28对P-N节,并且在TEC的两个陶瓷板的内表面分别布置一个温度传感器。每个TEC由微型变压器独立控制外部输入电压,通过改变电流方向实现制热和制冷的开关切换。当矩阵工作时,所有TEC都被施加不同的电压,以吸收或释放相应的热量。每个TEC的输入电压由如下制冷/制热公式决定:

式中,I和U分别为输入电流和电压,QL和QH分别为吸收和释放的热量,TL和TH分别为冷热面温度,α,R和κt分别表示每个TEC的Seebeck系数、电阻和热导。根据不同热模式所需的TEC的制冷或制热量,以及实时的冷热面温度,该平台可自动计算出每个TEC所需的电压。然而,对于确定的制冷或制热量,一旦输入电压U后,冷热面温度随即发生改变,即控制电压和冷热面温度之间存在反馈过程,每一个TEC的输入电压需要动态调整。因此,在TEC的冷热面布置了两个温度传感器来捕捉实时的温度变化。微控制器(MCU)通过反馈时间演化流程来调整输入电压,从而保证恒定的制冷或制热量输出。超表面平台的正面和背面如图1(b)和(c)所示。该平台高度集成化,具有较强的适应性。
整套系统的工作流程如图2(a)所示。用户通过人机交互界面将需要的热模式和优化程序(TPOP)输入计算机中,每一个热像素的制冷或制热量可以自动算出。数字化的热源矩阵被传输到MCU中。TEC中的两个电阻式温度传感器(RTD)将冷热面的温度传输到多传感器高精度数字测温芯片(DTMC)。之后,数字化的温度信息被传递到MCU中。通过人机交互界面将三个TEC的工作性能参数(Seebeck系数,电阻,热导)输入MCU。MCU计算出与每个TEC制冷或制热量相对应的输入电压,将该电压传输到数模转换器中(DAC)。每个TEC通过独立的驱动器(TECD)控制。当驱动器将电压输入TEC后,冷热面的温度即发生改变,之后新的反馈控制循环开始工作。

图2 面内热隐身模式切换
验证超表面平台面内热模式动态调控的实验台如图2(b)所示。有源物体对背景热场产生强烈干扰,探测器通过背景温度的畸变对目标进行热观测。热超表面平台可以对背景热场进行修饰。盾形、菱形和花瓣形的热斗篷的模拟和实验温度效果如图2(c)和(d)所示。从Ⅰ - Ⅵ可以看出,背景热场的温度梯度几乎是均匀的,仿佛有源物体从背景中消失。对于这六种可编程热模式的定量分析如图2(e)-(j)所示。每一种热模式对应的热源矩阵的制冷或制热量分布如图2(k)-(p)所示。根据这种分布,智能平台能够通过改变供应给每个TEC的电压编程不同的热隐身模式。正负值代表指制热量或制冷量。除了面内隐身效果,超表面平台还可以实现面内热幻觉。利用24×24矩阵实现了与斗篷形状相同的六个热幻觉模式。当超表面平台开始工作后,六种热幻觉图像如图3(a)所示。在这样的热场中,探测器将通过探知背景温度场的变化将实际物体误认为是幻觉物体。热幻觉模式的定量分析结果如图3(b)-(g)所示。24×24超表面平台热幻觉工具的热源矩阵如图3(h)-(m)所示。
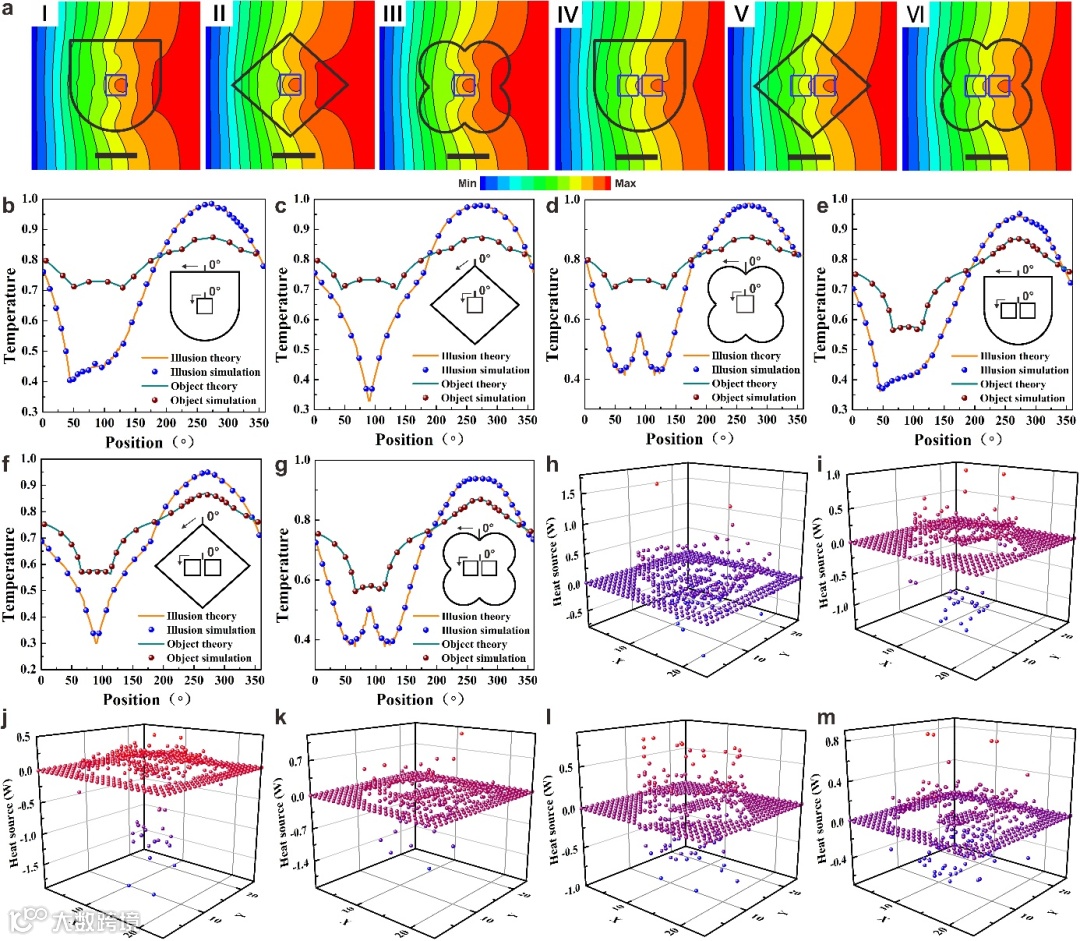
图3 面内热幻觉模式切换
超表面平台同样可以实现面外的热模式。假设这样一个场景,一个不断发热的物体处于掩体中,例如工作的发动机在大地中或者水面下,在掩体表面上的探测器(如无人机)无法通过视觉观察到掩体中的物体。然而,由于掩体内的物体不断释放热量,会在掩体表面形成热斑,此时,掩体面外的热探测器可以通过观测热斑确定发热物体的存在和位置。热斑的大小和强弱还可反应发热物体的特性。传统的热斗篷和热幻觉工具无法解决这个问题。然而,超表面智能化平台可以实现这种发热物体的热隐身或者欺骗热探测器。将超表面平台置于发热物体下方,可以通过在掩体表面组织复杂的热图形来欺骗热探测器。

图4 面外热模式切换
面外可编程热模式的实验验证如图4(a)所示。图4(b)和(c)分别为面外热隐身和热幻觉的模拟和实验温度效果。如图Ⅰ所示,由于有源物体不断向掩体释放热量,在其正上方的掩体表面会形成明显的热斑。此时,位于掩体上的热探测器可以观察到热斑的存在,从而判断有源物体的存在和位置。如图Ⅱ所示,当热超表面开启隐身模式后,在掩体表面的热斑消失,整个表面呈现出均匀温度场,好似物体不存在,从而起到热隐身的效果。另外,热超表面平台可以调控有源物体在掩体表面的热投影,从而实现热幻觉的效果。如图Ⅲ所示,掩体表面的热投影为与有源物体相同的虚拟物体在位于左下角的位置时的热斑,从而探测器会误认为被隐物体位于左下角。另外,热超表面平台还可以构建热分身的效果,如图Ⅳ和Ⅴ所示。掩体表面的热投影为两个或三个虚拟物体的热斑,好像有两个或三个克隆物体在掩体中,而把真实物体的热信号隐去。图4(d)-(g)为面外热模式效果的定量分析结果,热源矩阵如图4(h)-(k)。
本研究工作基于有源调控手段,搭建了10×10的热超表面平台。该平台可对热场的进行动态调控,实现可编程的热超材料功能。该研究为热超材料提供了可编程和集成化的思想,为动态热管理展现了新的方法和参考。该工作第一作者为西安交通大学和新加坡国立大学联合培养博士生郭君,西安交通大学屈治国教授和新加坡国立大学仇成伟教授为共同通讯作者,合作者包括新加坡国立大学许国强博士,西安交通大学博士生田地。

https://doi.org/10.1002/adma.202201093
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理,所有来稿文责自负,两江仅作分享平台。转载请注明出处,如原创内容转载需授权,请联系下方微信号。
