


今天我们继续为大家带来本周的超材料前沿研究精选,内容涉及光晶格中物质波极化子的形成,负泊松比的新型3D打印方形管状晶格超构材料,磁等离子体超材料的光学旋磁特性的观察,可编程软机器人介电弹性体折叠组装等敬请期待!
索引:
1.光晶格中物质波极化子的形成
2.磁等离子体超材料的光学旋磁特性的观察
3.利用激光自注入锁定技术生成Platicon微梳
4.具有负泊松比的新型3D打印方形管状晶格超构材料
5.具有可编程压阻响应的形状和刚度记忆离子凝胶
6.软体折纸爬行器
7.电驱动可重编程相变超表面达到80%的效率
8.折纸启发的可编程软机器人介电弹性体折叠组装
1.光晶格中物质波极化子的形成
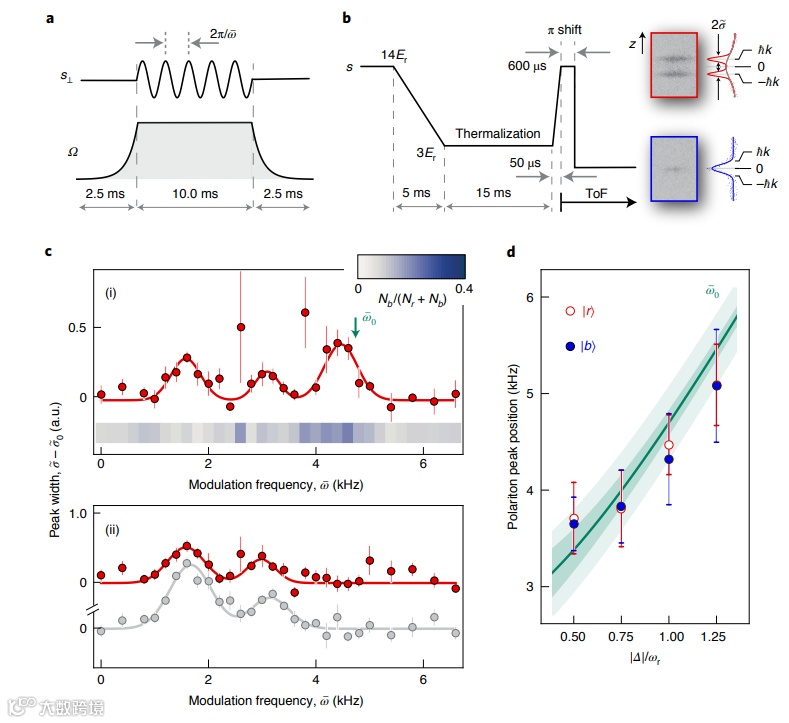
自从第一次将极化子描述为光和物质激发的叠加以来,极化子一直是理解固体中强光-物质耦合本质的关键。尽管极化子概念已被扩展到多个领域,但微腔极化子揭示了其本质,半导体中极化子的实现首次揭示了激子-光子模式分裂是一个移动的、动态耦合的准粒子特征,其色散关系是将两个组分的色散关系混合在一起。由物质激发介导的极化子相互作用为工程有效光子-光子相互作用开辟了新路径,这种相互作用可以诱导玻色-爱因斯坦凝聚和强相互作用的多体状态。在这种情况下,包括半导体微腔、里德堡极化、波导和电路量子电动力学在内的几个极化子平台为量子模拟提供了极大可能。然而,其中一个重大的挑战是实现具有可调参数的强耦合和交互,同时控制耗散并确保极化子的可伸缩性。
近日,美国石溪大学物理与天文系的Dominik Schneble研究团队开发了一种激子-极化子系统的超冷原子模拟物,在该系统中,相互作用的极化子相位完全可调且没有耗散。在该团队构建的光学晶格系统中,激子被原子激发取代,而原子物质波被光子取代,这两种成分之间的强动力学耦合混合了两种色散关系。他们通过耦合上下极化子分支,从光谱角度研究了物质波极化子的能带结构,并探索了超流体和莫特绝缘区中的极化子输运,其定量结果与理论预期相符。该工作揭示了极化子的基本性质和相关的多体现象,并为极化子量子物质的研究开辟了新的研究方向。相关研究成果发表在《Nature Physics》上。(钟雨豪)
文章链接:Kwon, J., Kim, Y., Lanuza, A. et al. Formation of matter-wave polaritons in an optical lattice. Nat. Phys. (2022).
https://doi.org/10.1038/s41567-022-01565-4
2.磁等离子体超材料的光学旋磁特性的观察
在过去的二十年里,超材料因其人工电磁特性而吸引了大量的研究关注,促进了左手材料、隐形隐身和超透镜的实现。根据Landau和Lifshitz的说法,传统材料的磁化率χm在光学频率下消失,即μ = 1。因此,μ≠1甚至μ< 0的光磁的实现就显得尤为重要。近年来,随着光磁的实现,出现了包括分裂环谐振器、切线对、介质/金属多层超材料、介质核-金属纳米粒子“卫星”纳米结构在内的各种介质谐振器。在光学频率下观察到强磁性,从而实现了超透镜、拓扑跃迁和界面束缚的等离子体模式。然而,到目前为止,只有μ张量的非单位对角分量被证明。μ的非对角线分量是很简单的。在光学频率下可以实现旋磁特性吗?回答这个问题将允许在超材料中操纵ε和μ张量,并有助于实现在光学频率下具有双焦向性特性的超材料。
近日,电子科技大学的毕磊教授团队及湖南大学的段辉高教授团队报道了在近红外波长的磁等离子体超材料的旋磁特性的观察,这是以前没有实验证明过的。利用一个经典的Au分裂环谐振器(SRR)结构,在MO薄膜Ce掺杂YIG (Ce:YIG)上,研究了杂化MO-SRR超材料中s偏振和p偏振的横向磁光克尔效应。利用转移矩阵方法,证明了μ的非对角元素达到了10−3级,在~900 nm波长下,至少比Ce:YIG薄膜高两个数量级。突发性旋磁特性的微观机制归因于由等离子体纳米结构调制的局部电/磁场方向,强调了在光学频率超材料中引入旋磁特性的一般策略。相关工作发表在《NATURE COMMUNICATIONS》上。(郑江坡)

文章链接:https://doi.org/10.1038/s41467-022-29452-9
3.利用激光自注入锁定技术生成Platicon微梳
在过去的十年里,光子集成微梳的开发和系统级应用取得了重大进展,这种微梳是一种相干的宽带光学频率梳,重复频率范围为毫米波到太赫兹。这些进展大多是基于对具有反常群速度色散(GVD)的微谐振器中的耗散克尔孤子(DKS)的利用。然而,也可以使用被称为暗脉冲、开关波或platicon的局部化结构,用正常GVD生成微开关。与需要特定设计和制造技术来进行色散工程的DKS微梳相比,platicon微梳可以使用如薄膜(即厚度低于300 nm)氮化硅和普通的GVD等的CMOS兼容的平台轻松构建。
近日,来自瑞士洛桑联邦理工学院物理研究所(EPFL)的Grigory Lihachev等人使用激光自注入锁定技术演示了一个在微波K波段重复频率下运行的完全集成的platicon微梳操作系统。耦合到Si3N4芯片的分布反馈(DFB)激光器边缘被自注入锁定到具有高约束波导的高Q(>107)微谐振器,并直接激励platicon,无需复杂的主动控制。他们演示了多platicon态和开关,进行了光反馈相位研究,并对K波段platicon重复率和泵浦激光器的相位噪声进行了表征。激光自注入锁定的platicons可以通过商业代工服务促进微梳作为光子集成电路构建块的广泛采用。相关研究工作发表在《Nature Communications》上。(詹若男)

文章链接:Grigory Lihachev et al. Platicon microcomb generation using laser self-injection locking. Nature Communications (2022) 13:1771
https://doi.org/10.1038/s41467-022-29431-0
4.具有负泊松比的新型3D打印方形管状晶格超构材料
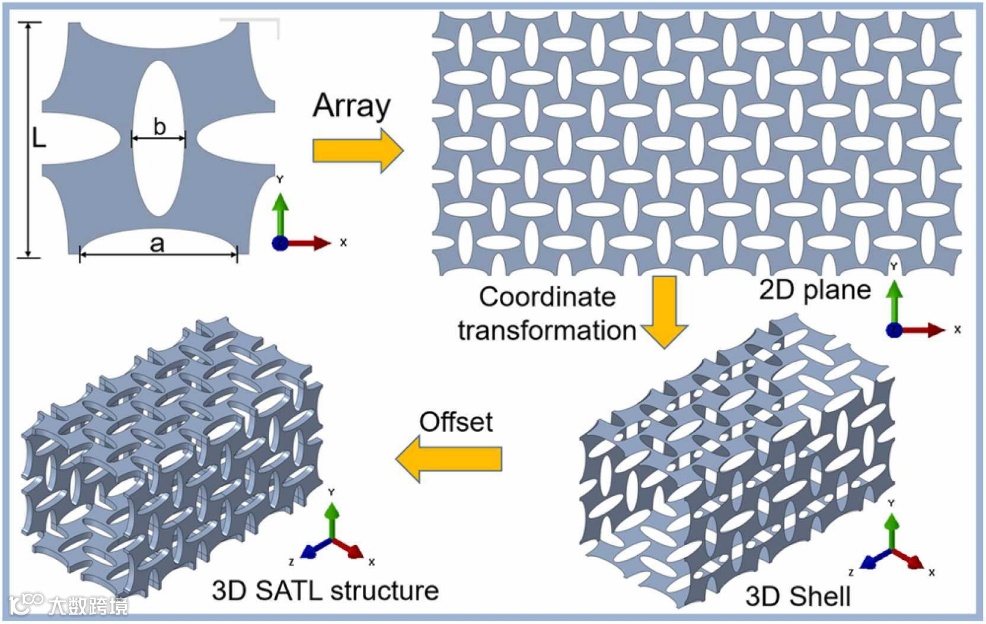
负泊松比超构材料又叫“拉胀材料”,它具有许多理想的力学性能,如抗压痕性、抗剪切性、抗断裂性和能量吸收能力。根据其力学性能和几何特性,可应用于不同的领域,如缓冲装置、抗震设备、钉子、智能过滤器和智能传感器。尽管拉胀材料可用于许多领域,但早期刚度低的缺点经常暴露出来。因此,提高强度是早期的研究重点。拉胀管状晶格结构作为一个重要分支,在医疗器械中得到应用。然而只是利用了拉伸下的拉胀行为,而忽略了其在压缩下的潜在应用。多种拉胀管状晶格结构表现出优异的力学性能。但大多数对拉胀管状结构的研究主要集中在圆形拉胀管状晶格结构的力学性能上,而方形拉胀管状晶格结构的研究工作尚未见报道。方形截面比圆形截面具有更大的截面惯性矩和截面模量,可知在不同载荷下方形管状晶格的吸能效果优于圆形管状晶格。因此,方截面管状晶格因其独特的几何形状和优良的力学性能在工程实践中得到广泛应用。因此,设计和探索方形拉胀管状晶格结构的力学性能具有重要意义,这也可以扩展拉胀管状晶格超构材料的家族。
近日,南京工业大学任鑫副教授团队设计、制造和研究了新型3D打印方形拉胀管状晶格(CATL)结构。通过有限元法和实验检验了它们的力学性能。高度和壁厚对SATL结构的力学性能有不同的影响。与圆形拉胀管(CATL)结构相比,SATL结构在轴向载荷下的峰值力较低。在横向载荷下,SATL结构具有更高的刚度和比能量吸收。此外,所提出的SATL结构的拉胀效应在横向载荷下也很明显。然后,对几种改进的SATL结构进行了数值研究,结果表明改进的方形拉胀管状晶格(ISATL)结构在轴向和横向载荷下具有更强的能量吸收能力。由于其独特的结构设计和优异的力学性能,SATL结构和ISATL结构在土木工程、车辆耐撞性和防护基础设施方面具有巨大的应用潜力。相关研究发表在《Additive Manufacturing》上。(徐锐)
文章链接:
D. Han, X. Ren, C. Luo, et al. Experimental and computational investigations of novel 3D printed square tubular lattice metamaterials with negative Poisson’s ratio[J]. Additive Manufacturing, 2022.
https://doi.org/10.1016/j.addma.2022.102789
5.具有可编程压阻响应的形状和刚度记忆离子凝胶
柔性压力传感器因其在人工智能、可穿戴医疗设备和软机器人中具有广泛的应用前景而备受关注。理想的压力传感器通常由稳定的电极和功能材料组成,并结合机械顺应性和适当的电气性能。最常用的基体材料包括导电聚合物和弹性体复合材料,如聚(3,4-亚乙基二氧噻吩):聚苯乙烯磺酸盐(PEDOT:PSS)、聚偏二氟乙烯(PVDF)、碳纳米材料和聚二甲基硅氧烷(PDMS)等。到目前为止,电流压力传感器,包括电容式、压电式、压阻式和摩擦电式传感器,已经使用设计良好或微结构的柔性基体材料实现了高性能。然而,由于基体材料固有的压缩性限制,大多数压力传感器的压力范围相对较窄。特别是在高压下,这种低灵敏度的传感器通常在高度压缩状态下失去传感能力,这严重限制了它们的进一步应用。最近有研究提供了通过使用相变复合材料或梯度结构作为具有可控力学和压缩性的活性基体材料来改善灵敏度和压力范围兼容性的新见解。刚度可调的材料具有自适应的压力变形关系,这可能导致压力传感器的耐压性能不同。因此,开发具有可调刚度的自适应材料是压力传感器在压力范围和灵敏度之间取得平衡、提高传感器固有性能的一个很有前途的解决方案。
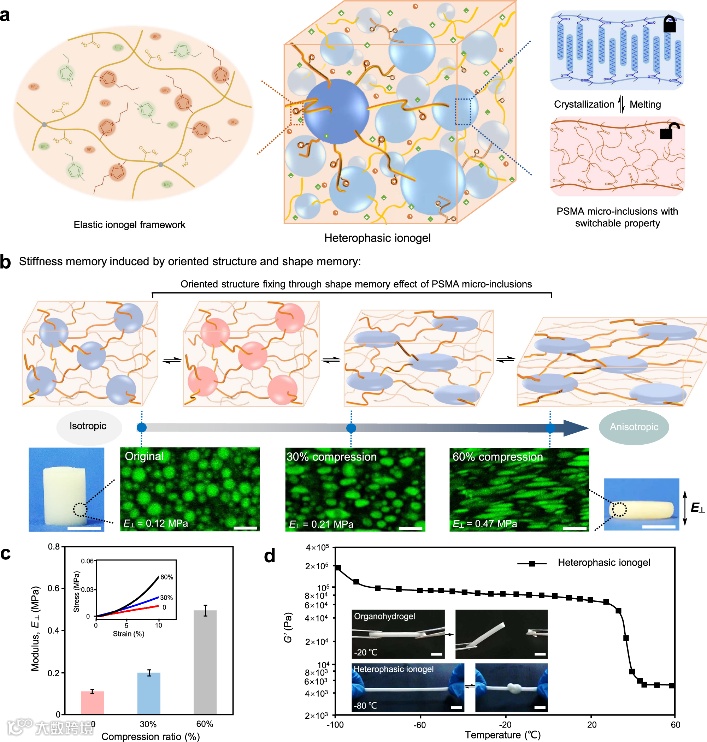
近日,来自北京航空航天大学化学学院、教育部仿生智能界面科学技术重点实验室的Shuyun Zhuo等人为自适应压力传感器制备了一种具有形状和刚度记忆的异相离子凝胶。通过结合用于刚度变化的微结构对准和用于刚度固定的形状记忆微夹杂物,异相离子凝胶显示出可调节的压缩性。离子凝胶的这种可控压力变形特性使得压力传感器的可编程耐压行为具有可调的压力范围、不同的检测限和良好的高压分辨率。刚度记忆离子凝胶传感器可实现220 kPa和380 kPa的宽压力范围,以及120 Pa到330 Pa和950 Pa的可调检测极限。此外,他们还提出了自适应检测,以监测低刚度下的微小压力变化,并在高刚度下区分不同的人体运动。在压力传感器中使用形状和刚度记忆材料是一种通用设计,目的是在更复杂的应用场景中实现可编程性能。相关研究工作发表在《Nature Communications》上。(詹若男)
文章链接:Shuyun Zhuo et al. Shape and stiffness memory ionogels with programmable pressure-resistance response. Nature Communications (2022) 13:1743
https://doi.org/10.1038/s41467-022-29424-z
6.软体折纸爬行器
蠕虫爬行运动一种普遍的导航策略,蠕虫身体收缩与接触表面之间的不均匀摩擦相结合,可以向前运动,且对复杂地形有较高的适应性。类似蚯蚓的爬行器通过平面内收缩实现运动,而类似尺蠖的爬行器则表现出平面外的弯曲运动。各种规模的爬行器应用广泛,如行星地下勘探、管道内检查和胃肠道内窥镜检查等操作空间有限或受限的应用。大多数收缩类爬行器只能通过单个驱动器驱动整个身体或多个单独的部分与多个驱动器协同驱动来实现直线运动。且转向功能需要附加的机构和执行器。这些执行机构具有大量电线或管道的笨重系统。复杂的结构和控制系统对生物医学领域等小规模应用提出了挑战。为此,另一种选择是由刺激响应软材料制成的爬行器,通过软爬行器本体的大变形产生收缩,通常具有相对简单的结构,允许小规模设计。虽然软材料易于变形和收缩,但其材料刚度较低,这使得爬行动物很难克服受限空间(如胃肠道和腹部)带来的巨大环境阻力。为了在这些环境中导航,需要允许有效收缩以进行爬行同时具有克服横向外部负载的能力的系统。
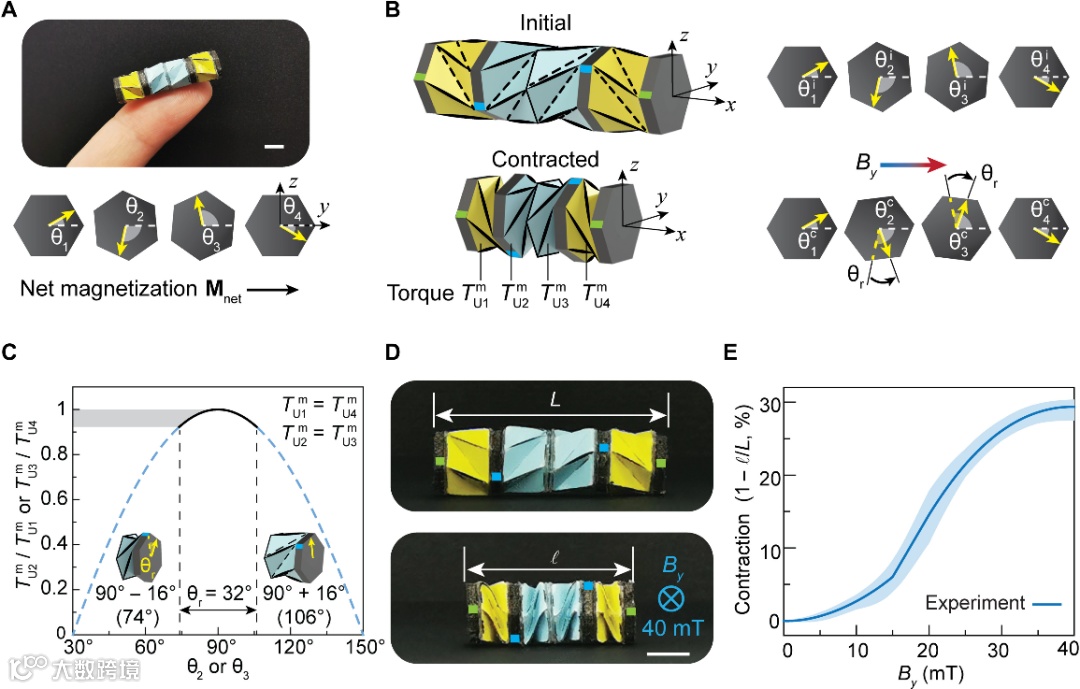
近日,美国佐治亚理工学院Glaucio H. Paulino教授和斯坦福大学赵芮可教授团队报告了一种磁驱动的小型折纸爬行器,用于有效的平面内爬行运动。该爬行器由四个单元的Kresling折纸组成,结构设计合理,避免了组件两端之间的相对旋转,消除了内部扭转,实现了有效的直线运动。通过有限元分析(FEA)从理论上推导和验证爬行器上所需的扭矩分布,以获得所有四个Kresling折纸单元的爬行运动同时收缩。然后通过分布式磁致动实现扭矩。通过控制外部磁场的大小和方向,Kresling折纸爬行器可以实现向前运动和瞬时转向的收缩。不受束缚的磁致动器消除了对笨重和有线致动器的需求,从而实现了小型整洁的机器人系统。沿Kresling折纸爬行器的轴向和横向测量的各向异性和磁可调结构刚度有助于爬行器在严格受限的空间内实现有效的运动。此外,还展示了药物储存和释放能力,以说明爬行器的多功能性。相关研究发表在《Science Advances》上。(徐锐)
文章链接:
Q. Ze, S. Wu, J. Nishikawa, et al. Soft robotic origami crawler[J]. Science Advances, 2022, 8(13): eabm7834.
https://www.science.org/doi/10.1126/sciadv.abm7834
7.电驱动可重编程相变超表面达到80%的效率
光学超表面是由密集排列的图案纳米结构阵列组成的平面器件,通过对入射光波进行任意的空间和光谱转换,扩展了传统庞大光学元件所实现的大多数功能。为了实现超表面制备后的调谐,可以结合具有可调谐特性的材料平台,如透明导电氧化物、液晶、二维材料、掺杂半导体和弹性体聚合物,利用传统的电光、机电和热光学效应(进行调谐)。尽管在实现可调谐超表面方面取得了令人印象深刻的进展,但现有的大多数演示都存在局限性,包括相对较弱的光调制强度(低Q值的纳米天线)、低光学性能(过度材料损失造成)、低速调制(受可调材料固有特性的限制)和/或具有挑战性的制造(由于非互补金属氧化物半导体(CMOS)友好的制造工艺)。因此,下一代自适应功能系统迫切需要新型高效的材料平台,改善振幅和相位调制的动态范围,便于像素级编程,提高调制速度,降低静态功耗。
近日,美国乔治亚理工学院的Sajjad Abdollahramezani等人演示了按需光学调制和波前工程,使用电驱动的、完全可逆的、可重构的基于Ge2Sb2Te5的超表面,具有多种中间状态和大调谐范围,通过合理的多物理模型的协同优化,考虑到极端的电、热、以及材料的光学性质。该平台在包括成像、计算和传感在内的多个领域具有重要的应用潜力。相关工作发表在《NATURE COMMUNICATIONS》上。(郑江坡)

文章链接: https://doi.org/10.1038/s41467-022-29374-6
8.折纸启发的可编程软机器人介电弹性体折叠组装
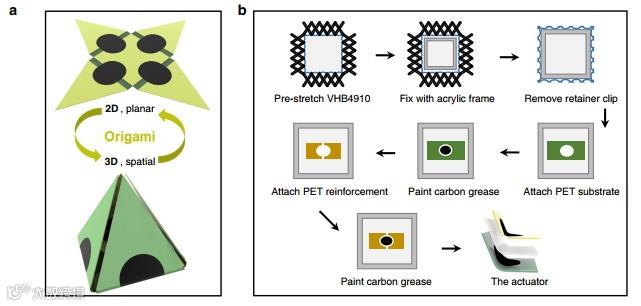
软体机器人在机械和生物医学工程方面具有不可替代的优势。由于其柔软的身体,软体机器人可以调整其身体形状以适应复杂的物理环境,并通过狭窄的通道,这是刚性机器人无法实现的。此外,它们身体柔软的特性也能防止它们接触到的物体受到锐器伤害,使它们能够进入人体运送药物,或在临床手术中充当医疗机器人系统的操作员。事实上,为了提高机器人行走、医疗操作和三维物体抓取的可操作性,构建具有柔性和可变三维结构的软机器人至关重要。目前,3D软机器人通常是通过3D打印和装配小型驱动器来制造的。与3D形状相比,2D形状在空间维度上更节省空间。因此,折纸启发的3D软体机器人构造,源于固有的简化和低成本的基于折叠的装配技术,是一种很好的策略,因为它能够为3D结构构造执行面外变形,并在2D和3D之间切换。这是未来智能机器人系统的理想选择。
近日,电子科技大学光电科学与工程学院Junsheng Yu等人提出了一系列的材料,结构设计和制造方法,以开发独立的,电控折纸三维软机器人行走和软操作。三维软机器人是一种以介质弹性体(DE)薄膜为变形层,以激光切割PET薄膜为支撑柔性框架的多层结构软驱动器。软体致动器的三角形和矩形设计使它们可以很容易地组装成爬行软机器人和金字塔形以及方形的三维结构。爬行机器人具有非常稳定的爬行行为,能负重行走。受折纸的启发,金字塔形和方形三维软机器人展示了可编程的平面外变形以及二维(2D)和三维结构之间的轻松切换。电可控的折纸变形使三维软机器人能够作为软机械手抓取和精确锁定三维物体。研究结果表明,基于折纸技术的柔性致动器的折叠组装对未来智能多功能软体机器人的发展具有一定的参考价值。相关研究工作发表在《Microsystems & Nanoengineering》上。(丁雷)
文章链接:Yanhua Sun, et al, Origami-inspired folding assembly of dielectric elastomers for programmable soft robots, Microsystems & Nanoengineering (2022).
https://doi.org/10.1038/s41378-022-00363-5.
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理(按照法规支付稿费或立即删除),所有来稿文责自负,两江仅作分享平台。转载请注明出处,如原创内容转载需授权,请联系下方微信号。
