

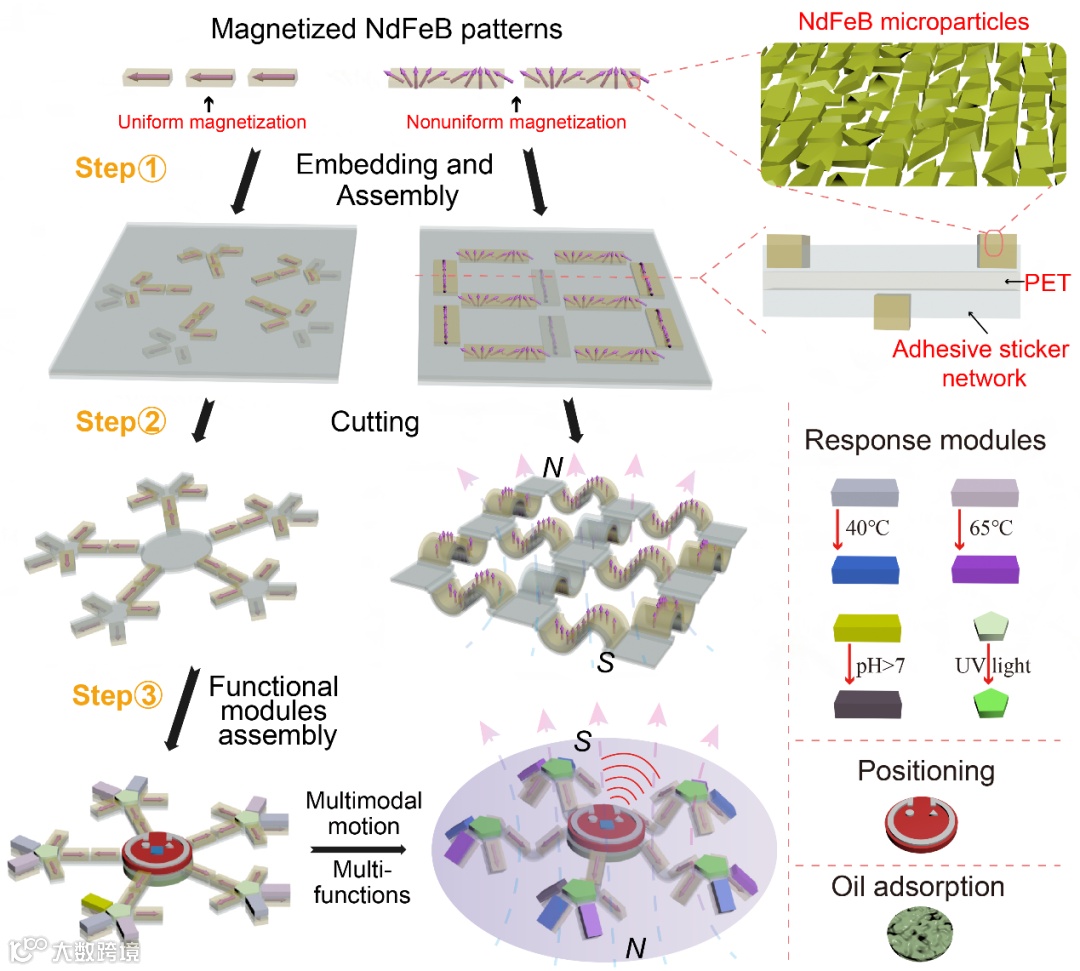
区别于传统的具有机械结构的刚性机器人,软体机器人以其灵巧的结构变化的优势被成功地应用于易碎货物抓取、生物仿生学智能电子、和体内药物精准递送等领域。机器人的特殊功能实现往往取决于其灵巧的结构变化。对于磁控软体机器人,其变形主要由其磁化形式决定,因此实现可编程磁化能够提高机器人的变形多样性。目前报道的磁控软体机器人由于磁化形式的约束,其变形多为弯折变形,而具有多个曲面变形结构的磁控软体机器人鲜有报道,这也是目前研究的一大难点。同时,实现机器人的多功能性,比如环境感知,定位等能够进一步增强其作用效果以及扩展其应用领域。而多种材料的无缝整合可以实现这一目的,这也是目前小尺度软体机器人研究的热点。
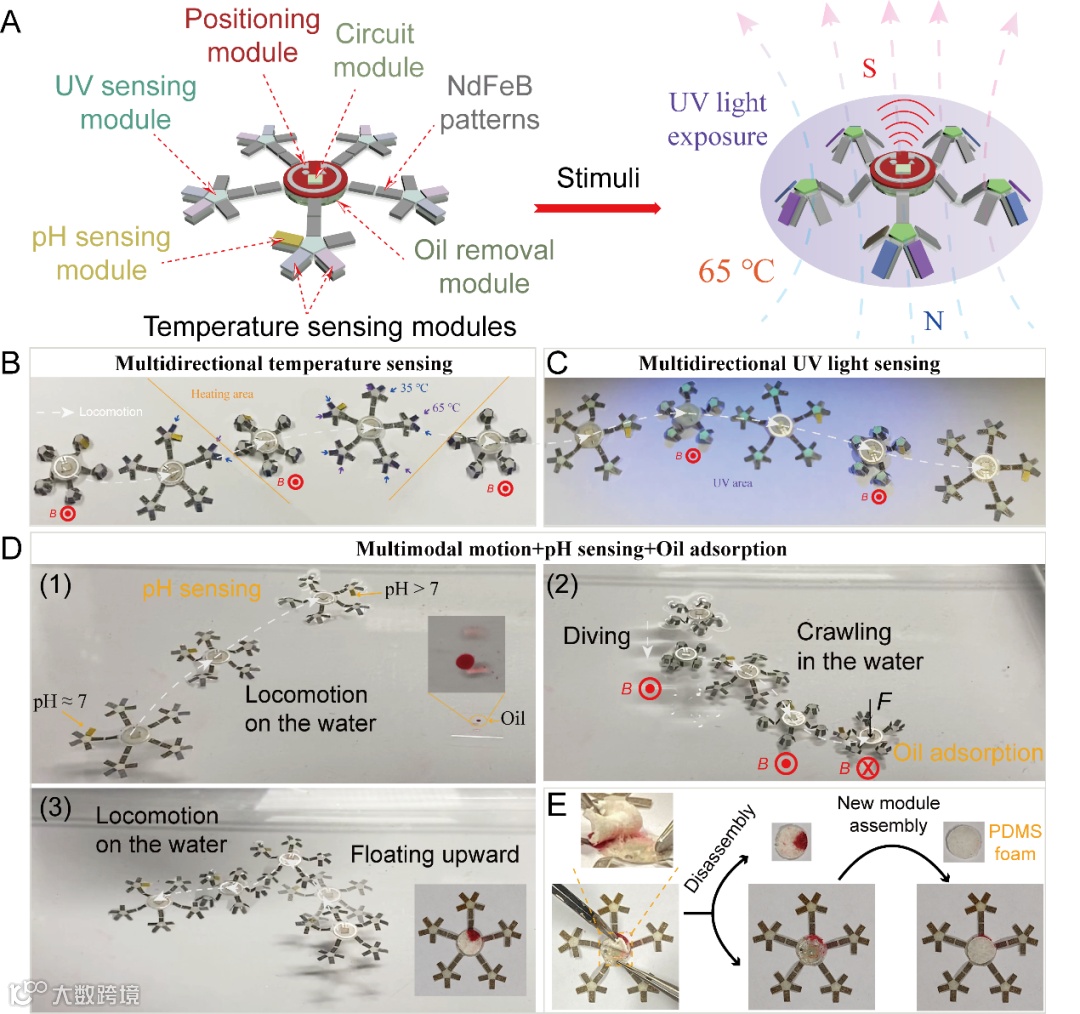
鉴于以上磁控软体机器人存在的问题,香港中文大学机械与自动化工程学系张立教授团队,与香港城市大学生物医学工程学系张甲晨教授团队和卡耐基梅隆大学机械工程系Carmel Majidi教授团队合作,成功开发出模块组装的策略,用于可编程磁控多功能软体机器人的研究及其应用。该策略可实现机器人多样的结构变化,也可实现具有不同材料性质的多功能模块的组装,旨在提高小尺度软体机器人的多功能性和应用前景。研究成果以“Untethered small-scale magnetic soft robot with programmable magnetization and integrated multifunctional modules”为题刊登于国际学术期刊《Science Advances》。论文第一作者为香港中文大学博士后董悦博士。


近五年来,张立教授课题组在磁驱动小型机器人领域发表了超过一百篇学术论文,实现了从毫米、微米到纳米机器人及其集群行为的研究与应用。部分成果如下:Nature Machine Intelligence, 2022, 4(5): 480-493.;Matter, 2022, 5(1): 77-109.; Adv. Mater., 2022: 2201888.; Adv. Mater. 2022, 2109126; Adv. Funct. Mater., 2022: 2112508.; Sci. Robot., 2021, 6(52): eabd2813.; Sci. Adv., 2021, 7(9): eabe5914.; Adv. Mater., 2021, 33(37): 2100070.; ACS Nano, 2021, 15(3): 5056-5067.; Nat Commun 10, 5631 (2019); Sci. Adv., 2019, 5(1): eaau9650.; Nat Commun 9, 3260 (2018).
港中大张立教授、哈工大谢晖教授Adv. Funct. Mater.:具有变形、环境适应性和多功能的可重构磁性“史莱姆”软体机器人
中科院深圳先进院杜学敏研究员团队与香港中文大学张立副教授合作发表仿生智能驱动器研究进展综述
MIT赵选贺团队首创磁控软体导丝机器人, 有望微创清理复杂血管
斯坦福赵芮可教授《Nat. Commun.》:人体内的体操高手 - 无线两栖送药机器人
