


撰稿|由课题组供稿
近日,河南科技大学李新忠教授与山东师范大学蔡阳健教授、新加坡南洋理工大学申艺杰助理教授合作提出了一种新的结构光操纵任意结构微粒的理念,将粒子和光束视为一整个刚体模型,颠覆传统光镊技术(点对点操控)的基本原则。通过这种新理念,实验构建了具有更多自由度和更高维度的六维新型光镊。从此,对于不规则结构的粒子不再需要点对点的分立式复杂光束操控,而是通过构造刚体一样的结构光场与目标物体(可以是不规则粒子也可以是多粒子)耦合起来,粒子的全自由度六轴操控与光的结构操控得以一体化实现。这是光镊技术基本原理的重大简化、优化、和革新,为未来更极端的光与物质相互作用铺平了道路。
该研究成果以“Multidimensional optical tweezers synthetized by rigid-body emulated structured light”为题发表在Photonics Research上。
最近,具有更大扩展自由度和更高维度的结构光由于其先进的应用而引起了越来越多的关注,这在具有更多功能和更高精度的光捕获或光镊技术中具有重要意义。然而,利用目前的光镊技术来进行超越三维的操纵仍然很困难,这种限制源于传统的光镊操纵理念,即被捕获粒子的运动在三维空间中表现为点运动。这种理念没有涵盖完整的运动模式,这也是为什么机械领域需要开发六轴机械臂和多轴无人机的原因。
针对这些问题,该合作团队首先构造了一个可以在自由空间中任意旋转和位移、而整体维持刚性的环状结构光束;然后结合坐标变换技术和傅里叶位移定理,实现了六轴刚体中的六个独立自由度运动:沿x-y-z轴的位移及沿x-y-z轴的旋转(章动,旋动,进动);最后,将这种环形结构光束和被捕粒子结合为一个刚体,实验验证了可自由定制的任意空间轨迹六个自由度的运动操控新模式。

图1: (a) 传统光镊操纵模式,(b) 六维操纵的刚体结构光镊。
如图1(a)所示,在传统的光镊中,被捕获的粒子被视为质点,光和粒子被分开处理,研究粒子的运动状态,只存在沿着x-y-z三个轴的位移最多三个维度(surge,sway和heave);这就严重制约了光镊操纵粒子的自由度。在该团队提出的新理念中,捕获粒子和环形结构光束被视为一个刚体,并利用刚体力学进行分析,如图1(b)所示。此时粒子的运动可以看作是刚体上的一部分,从而其具备了刚体运动的新自由度也即围绕x-y-z三个轴的旋转(roll,pitch和yaw)。根据Schaller定理,刚体的位移可以通过沿其螺旋轴(Mozzi轴)平移,然后绕平行于该螺旋轴的轴旋转来产生。研究中,所有刚体运动都分两步进行:先确定位移然后执行旋转,且旋转被均匀地插值到位移中。

图2:多维光镊六个自由度示意图
基于这一理念,如图2所示,刚体光镊由两个半圆涡旋光束组成,用两种不同的颜色表示。这两个部分携带相反的拓扑荷值,并在其中一个结处产生一个干涉点,形成镊尖来捕获粒子。无论粒子在刚体光镊的范围内任意位置被照射到,它最终都会被捕获在光镊的尖端。这样粒子就和光束组成一个刚体,之后光束进行刚体的旋转和位移;由于尖端的捕获力,粒子也作为刚体的一部分进行相应的运动。

图3:(a1) - (a5)验证了光束的导向能力,光束参数为自旋角φ = 0-2π。(b1) - (b5)第一行对应的三维模型示意图。(c1) - (c5)采用自旋角ψ = 0-2π和沿z轴位移Δz = 0-15 μm对酵母细胞过程中记录的图像进行处理。(d1) - (d5)第三行对应的3D模型示意图。(e1) - (e5)实验中对酵母细胞进行180º翻转时的图像,光束参数为章动角ψ = 0-2π。(f1) - (f5)第五行对应的三维模型示意图
为了验证多维度操纵的能力,研究者设计了一系列实验。首先对两端不对称的酵母菌细胞进行x-y平面的旋转操纵如图3(a1)-(a5)所示,实验结果表明酵母菌较大的一端始终朝向外侧,与预期相符。第二个实验是在实验一的基础上附加上沿z轴的位移,此时粒子的轨迹是一个三维螺旋线;从实验图中可以看出,粒子很好的跟随着光束进行了运动。第三个实验是针对复杂粒子,因此选取了一大一小两个黏着的酵母菌细胞进行实验,此时光束沿y轴旋转180°;从实验图中可以完整的看到小粒子从右下方到大粒子下方,再从下方移动到左上方的过程。该实验充分验证了六维光镊对粒子朝向的控制能力。此外通过光束旋转,六维刚体光镊的捕获范围也将随之扩大,如动图1所示。

动图1:通过调整进动角捕获不同平面内的酵母菌细胞。
为了验证其他自由度操纵能力并体现六维刚体光镊的优势,他们同时捕获了两个粒子,并设计了一个更复杂的三维摆线轨迹,如动图2所示。为了实现这一目标,光束被修改为两个尖端(六维光镊的尖端的数量和位置是可任意定制的)。为了使3D模型更加清晰,他们将粒子分别涂成红色和蓝色来突出它们的位置,并添加两个相同颜色但方向不同的箭头来指示方向。显然,被捕获粒子的轨迹与给定三维模型的路径很好地吻合。值得注意的是如此复杂的运动轨迹,不论是使用现有的全息光镊法,还是光束塑形的方式,都需要根据轨迹对光束进行重大调整。而这种刚体操纵的最新方式,六个独立自由度对应了六个相互独立且可任意调控的参数,只需要设置相应的参数即可得到对应的自由组合出来的运动轨迹,这大大简化了光镊设计。
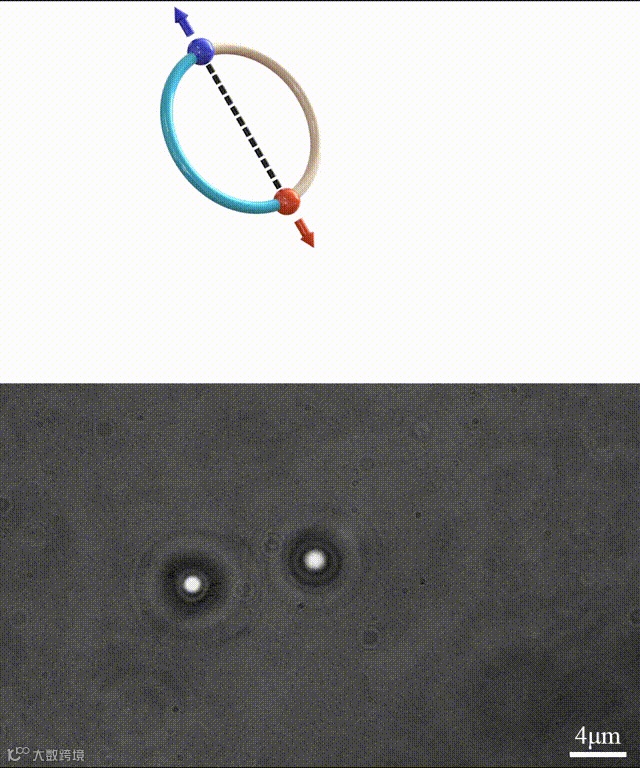
动图2:同时捕获两个酵母菌细胞并进行复杂轨迹运动。
该团队首次以崭新的视野将结构光束与被捕获微粒看做一个刚体,进而设计出了可执行复杂运动的新型六维刚体光镊,这为粒子操纵提供了全新的思路和自由度。作为拓展,该新型六维刚体光镊可以同时产生多个间距可控的镊尖,从而实现多微粒的复杂运动控制,并且刚体结构光耦合一体式操控也大大简化了光镊设计。此外,该新型光镊的结构光束也可以设计为其他任意形状(不局限于圆光束),这为新型光镊的设计、应用提供了新思路和新机制。
该工作得到了国家重点研发计划(2022YFA1404800,2019YFA0705000)、国家自然科学基金(12274116,11974102,12192254,92250304,11974218)、河南省高校重点科研项目(21zx002)、河南省杰出青年科学基金(232300421019)和瞬态光学与光子技术国家重点实验室开放基金(SKLST202216)的资助。
原文链接:
https://www.researching.cn/Articles/OJcf08b4529ffbc802
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间后台联系,我们将协调进行处理,所有来稿文责自负,两江仅作分享平台。转载请注明出处,如原创内容转载需授权,请联系下方微信号。
