文献编号:No. 415(EU-131)
文献来源:
N. Akram, M. Khoshrangbaf, M. Challenger 和 O. Dagdeviren 发表于 IEEE Access,2025 年,卷 13,页码 109854–109866,DOI: 10.1109/ACCESS.2025.3581944。
研究机构:
文摘内容:
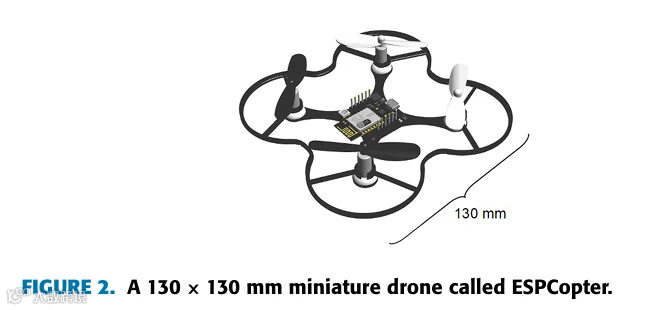
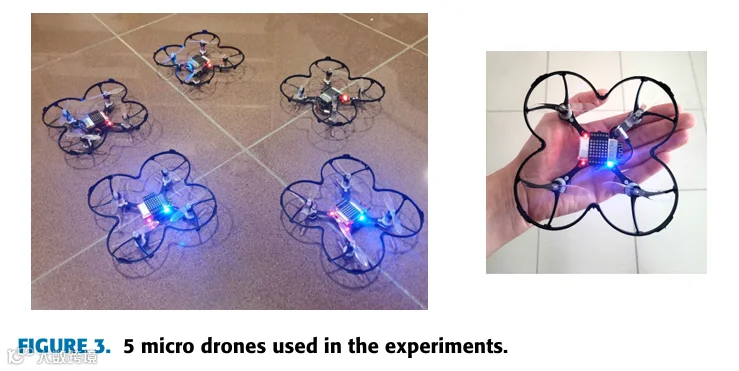
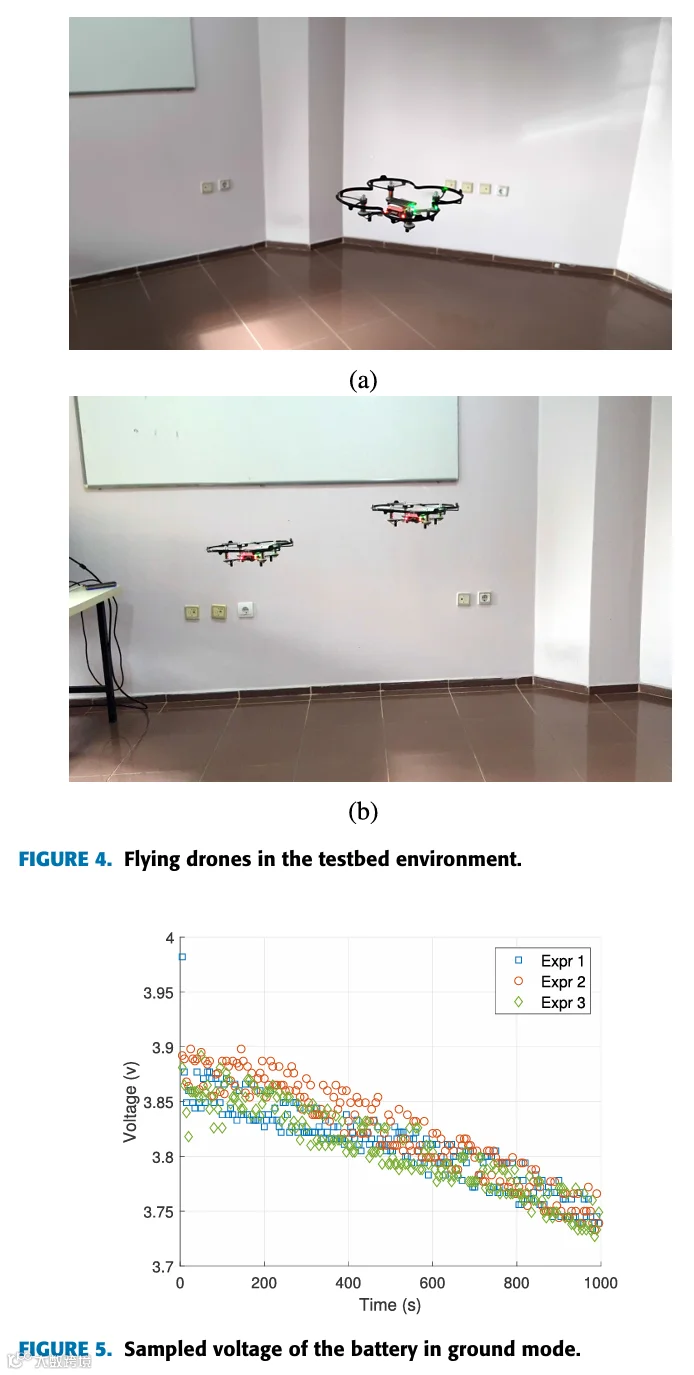
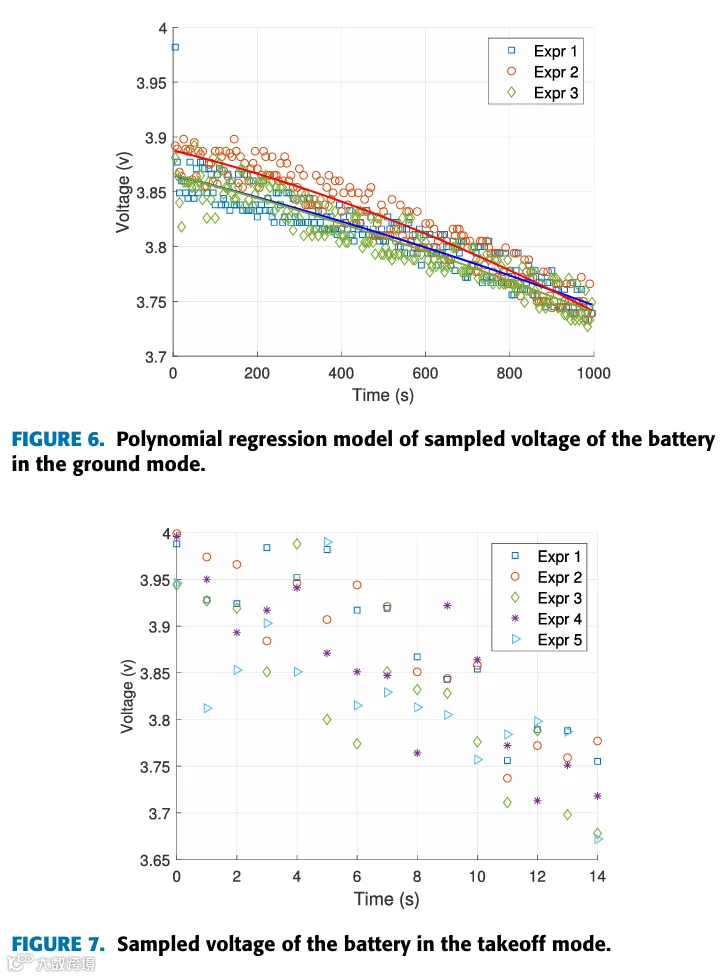
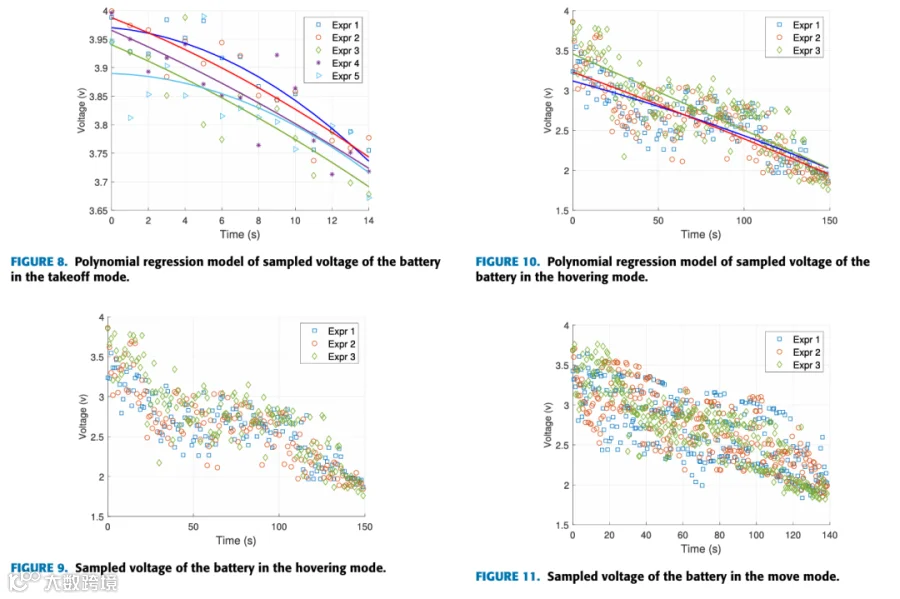
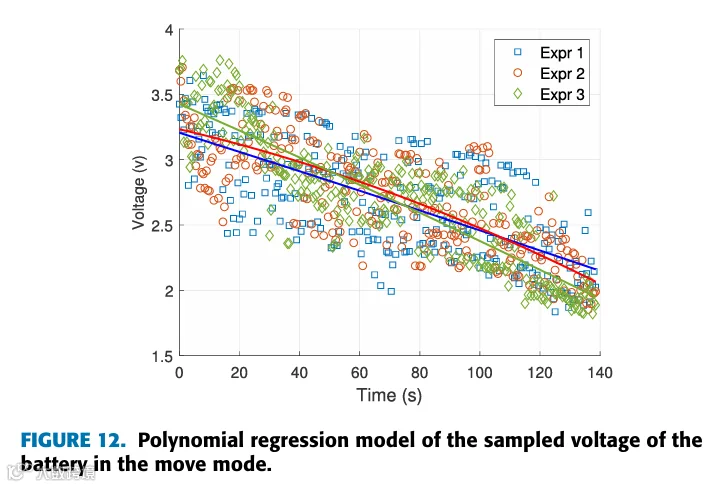
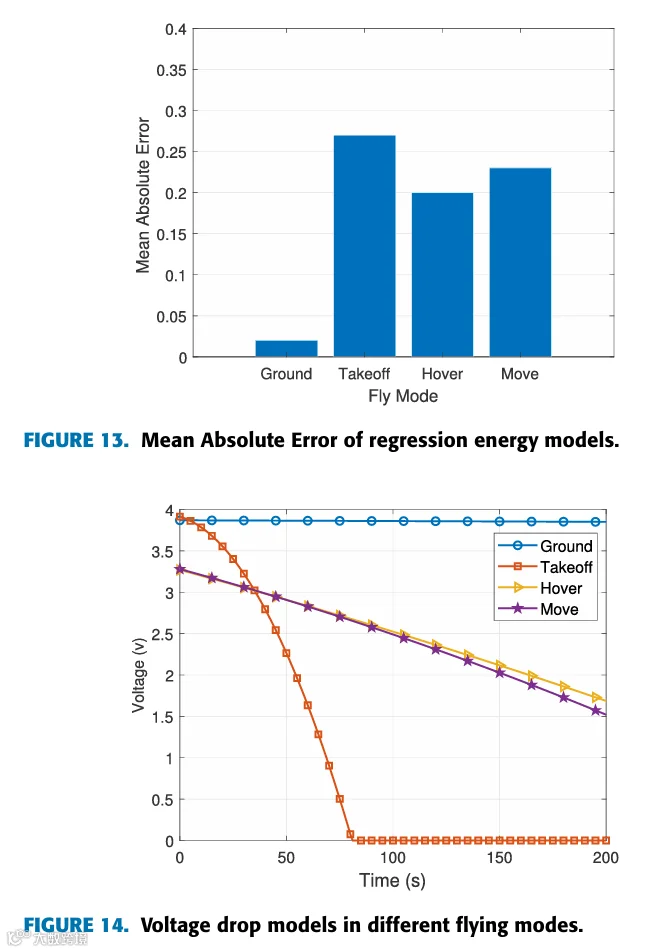
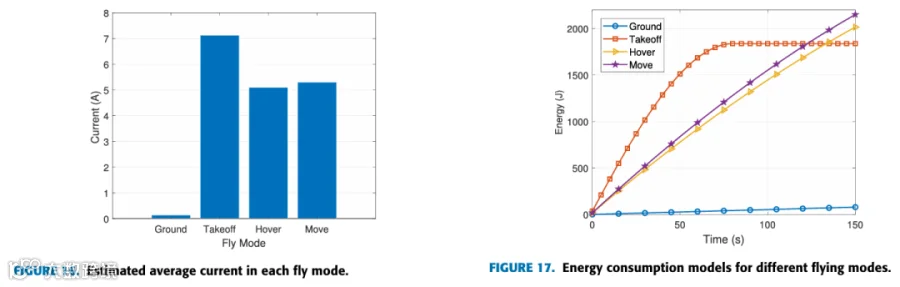
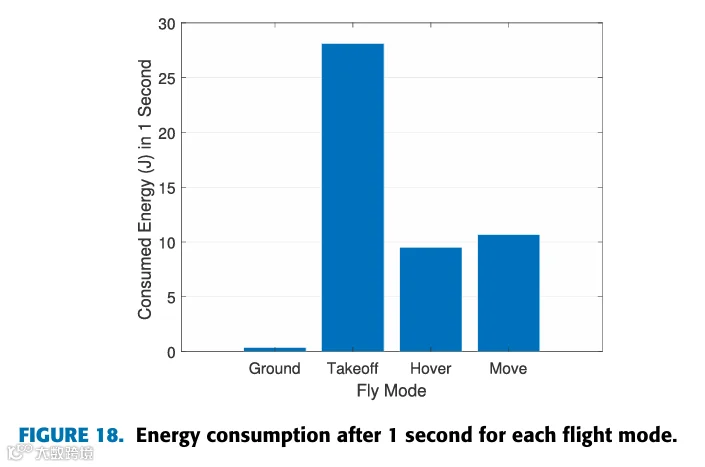
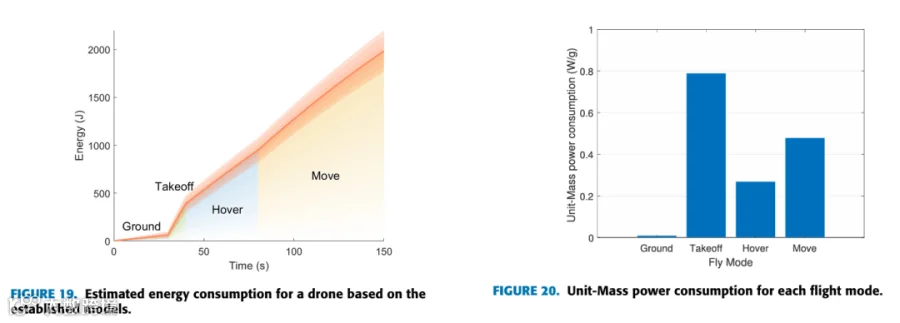
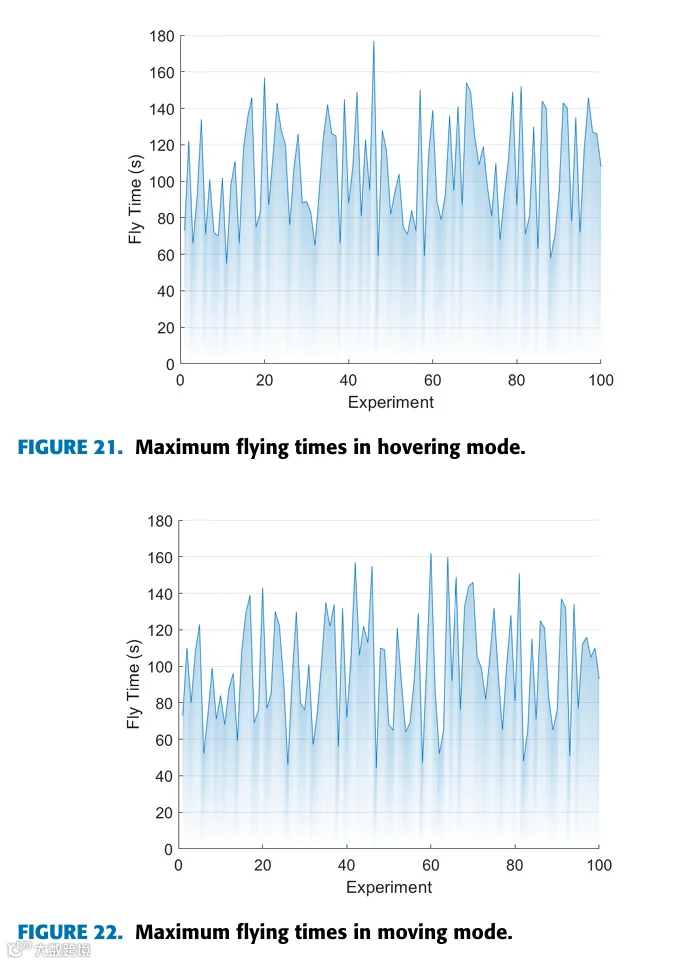
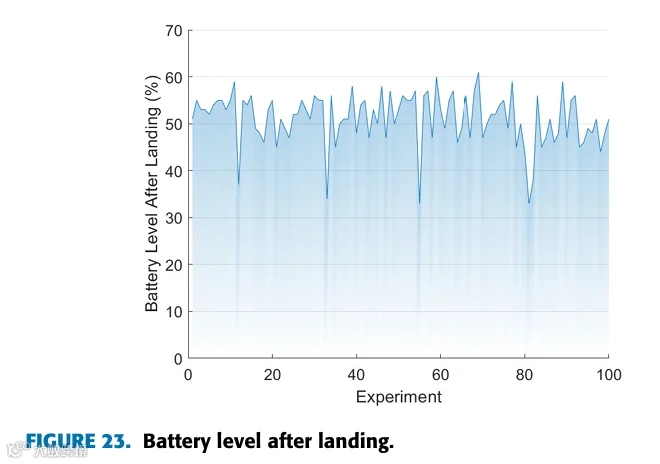
自动驾驶飞行器已成为多领域应用的关键技术。微型无人机因其手掌大小的体积,可在密闭或复杂环境中灵活作业,获取关键数据。然而,其小型化设计限制了电池容量与传感器搭载能力,导致续航能力成为主要瓶颈。为提升能效,本文提出一种基于电压的回归模型,用于估算微型无人机在地面、起飞、悬停及飞行等模式下的能耗与飞行时间。实验数据显示,该模型在各类飞行模式中的平均绝对误差低于 0.3 V。150 秒飞行测试中,总能耗估计为 2000 J,平均功率为 13.3 W,单位质量功耗为 0.38 W/g,显示出其适用于能量受限任务。研究还发现,当电池电量降至约 50% 时,电压无法支撑继续飞行,凸显高能量密度轻质电池对微型无人机发展的重要性。
文献图表



研究结论
能耗建模与飞行性能分析
电池性能限制
未来研究方向