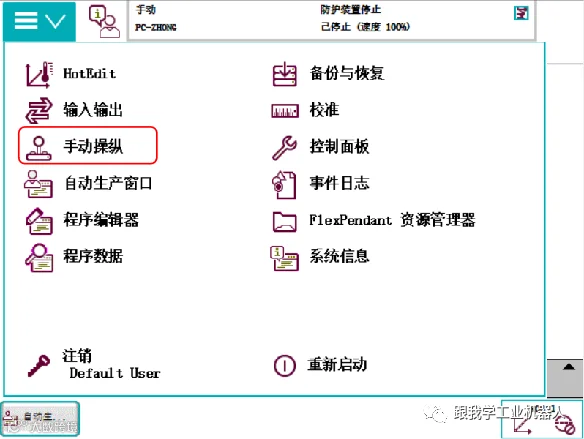
手动操纵模式下创建工具坐标系
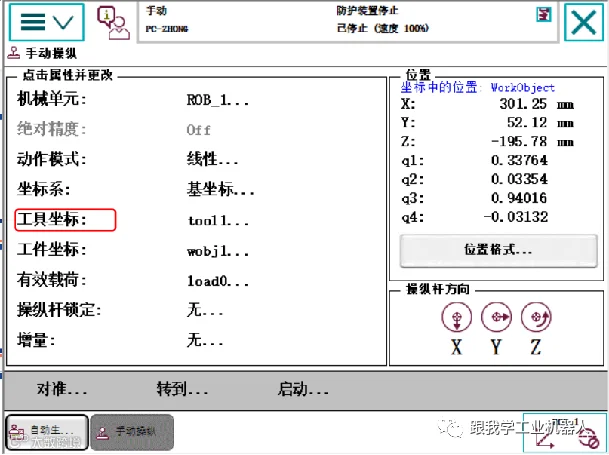
进入主菜单,选择“手动操纵”功能。
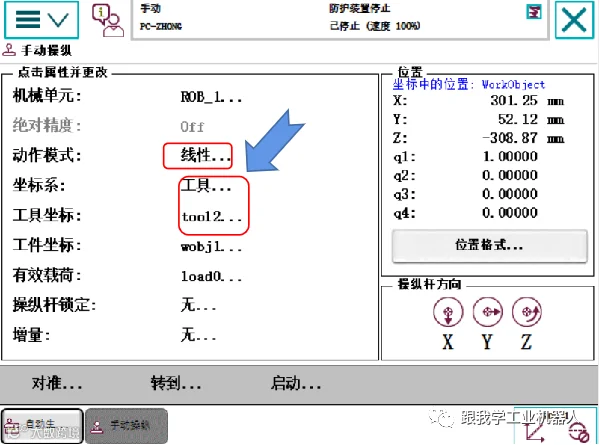
设置动作模式与坐标系
在手动操纵界面中,将动作模式设为“线性”,坐标系选择“基坐标”,并选择“工具坐标”选项。
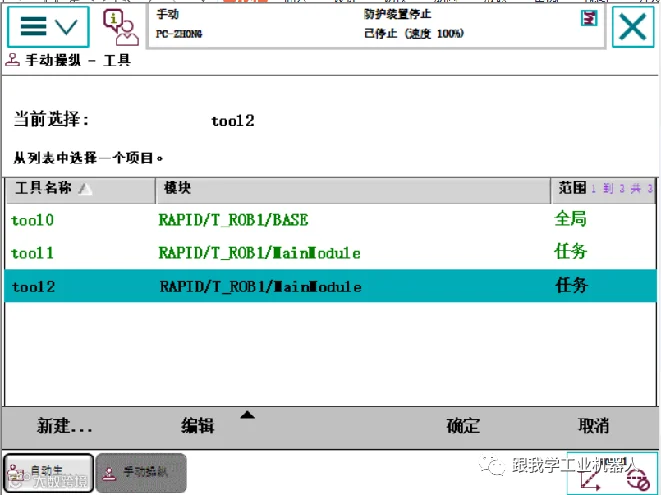
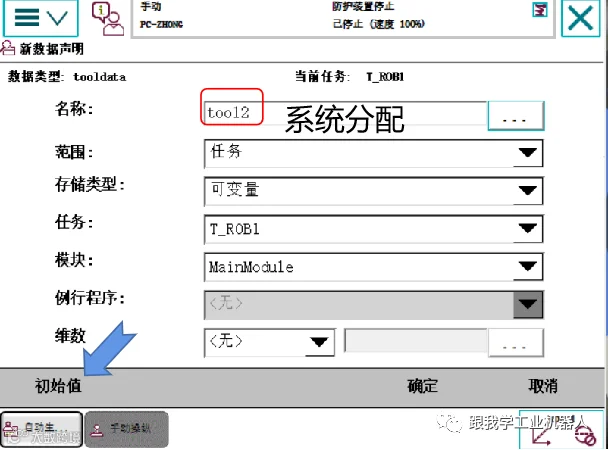
新建工具坐标系
点击“新建...”以创建新的工具坐标系数据。可使用系统默认命名或自定义名称,随后点击“初始值”进行参数设置。

设置工具参数
修改工具的重量和重心两个关键参数,完成后点击“确定”保存设置。
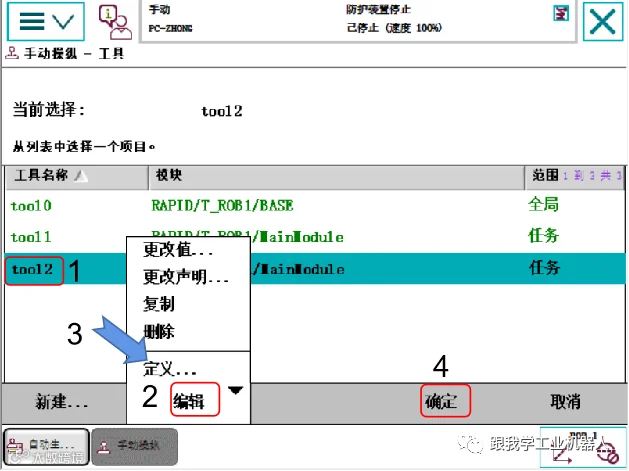
定义TCP及坐标轴方向
选中刚创建的工具坐标系,点击“编辑”菜单中的“定义”选项,开始配置TCP(工具中心点)及坐标轴方向。
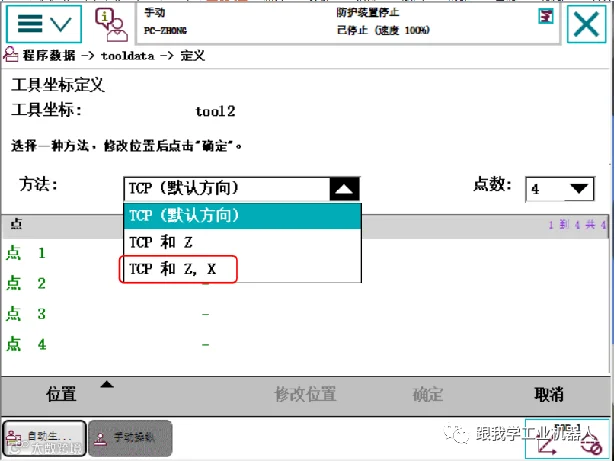
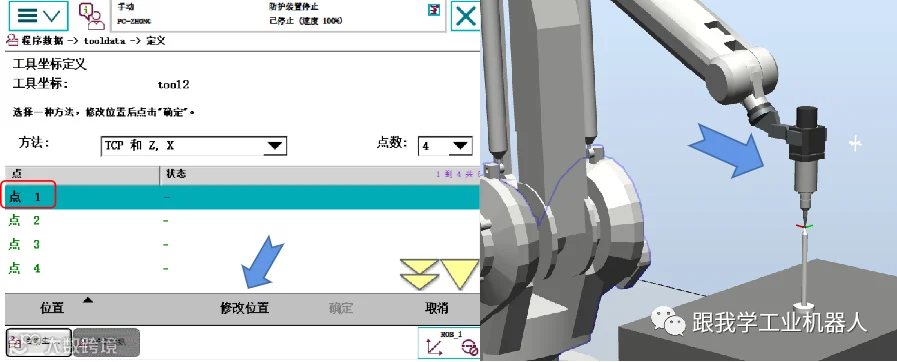
选择定义方法
在“方法”中选择“TCP和Z,X”,采用4点法进行标定,用于确定TCP位置以及Z轴和X轴的方向。
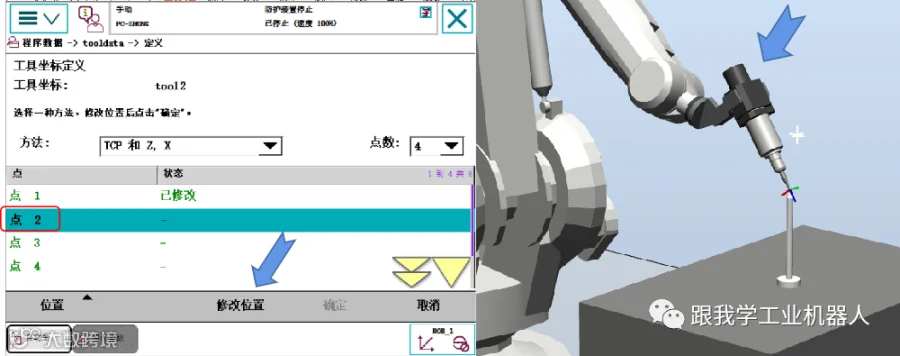
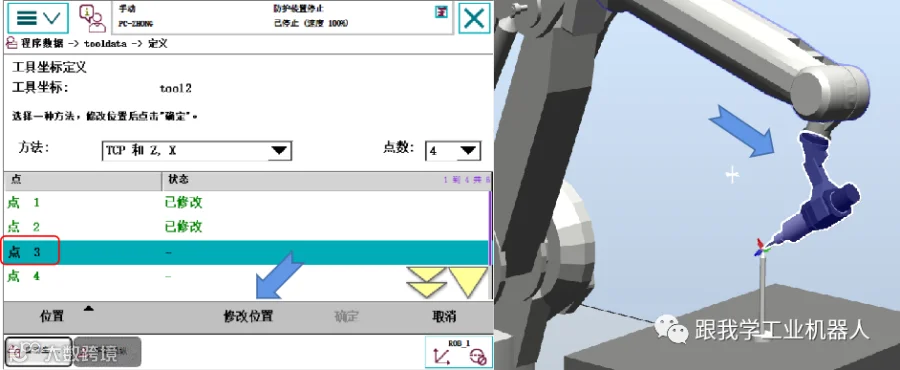
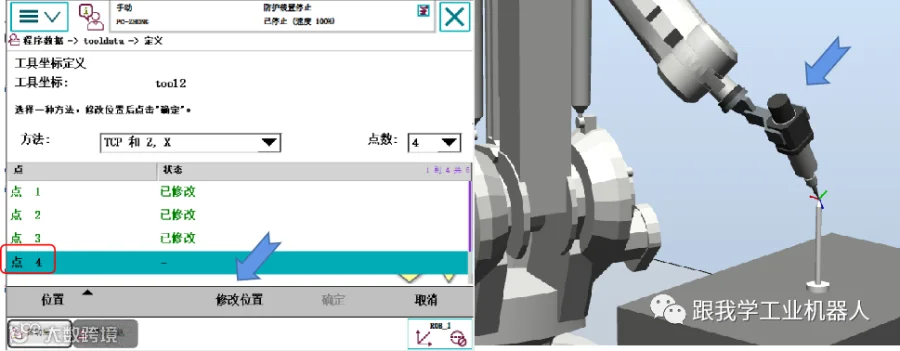
执行四点法标定
依次选择“点1”至“点4”,将机器人移动到对准参考点的不同姿态,并分别点击“修改位置”完成各点记录。
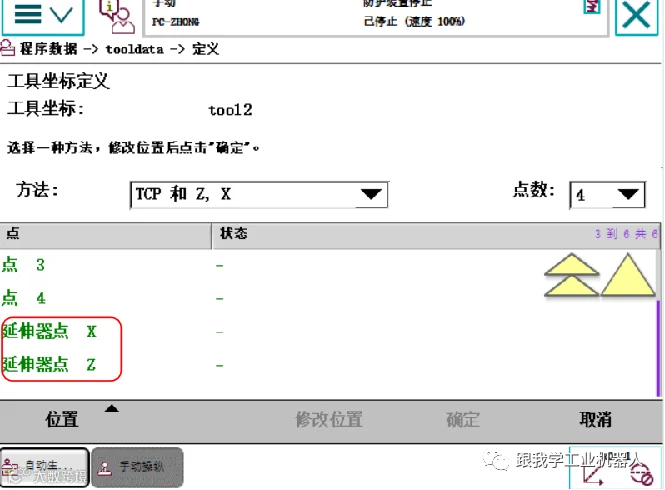
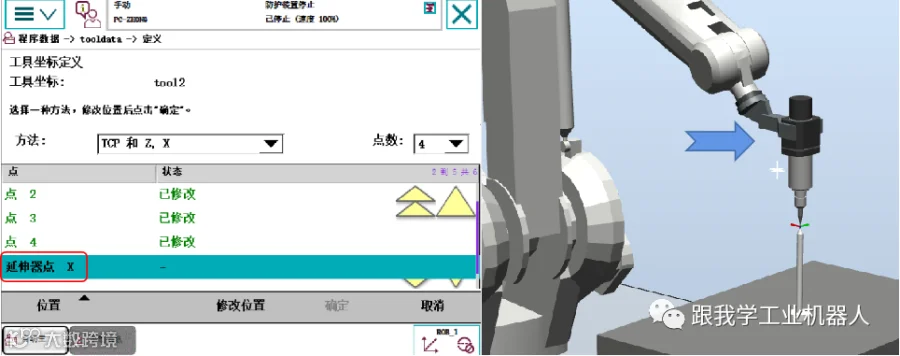
定义X轴方向
选择“延伸器点X”,将机器人移至指定姿态并对准参考点。保持姿态不变,将机器人向本体方向移动(即X轴负方向),点击“修改位置”确认X轴方向——前方为X轴正方向。
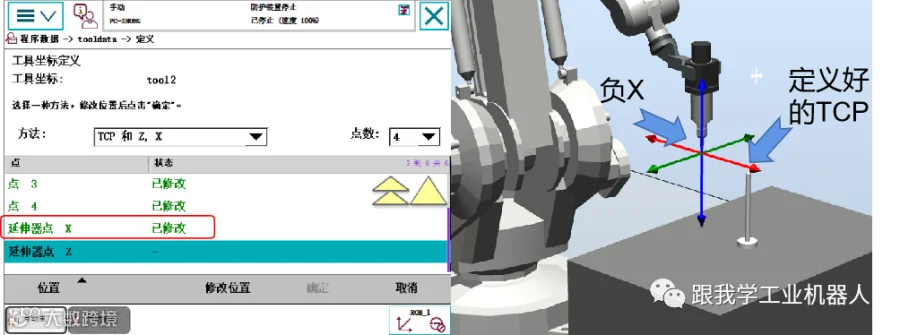
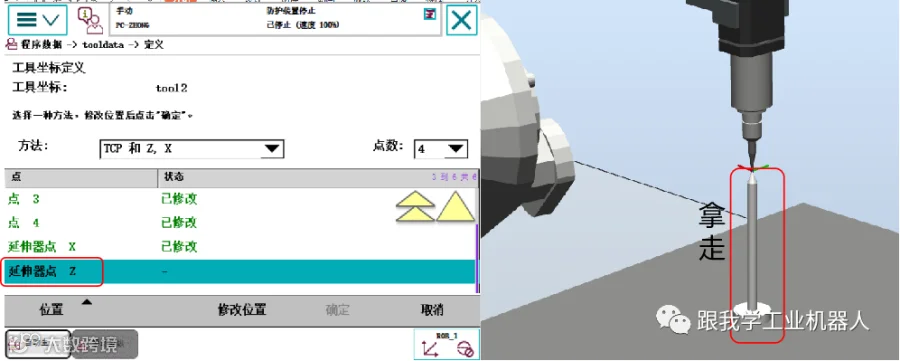
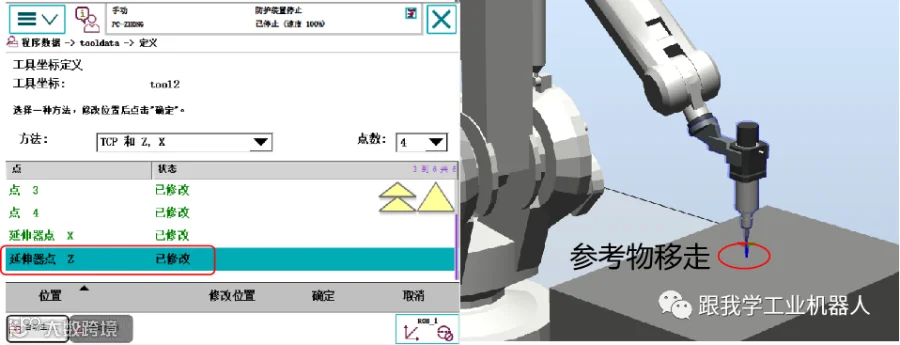
定义Z轴方向
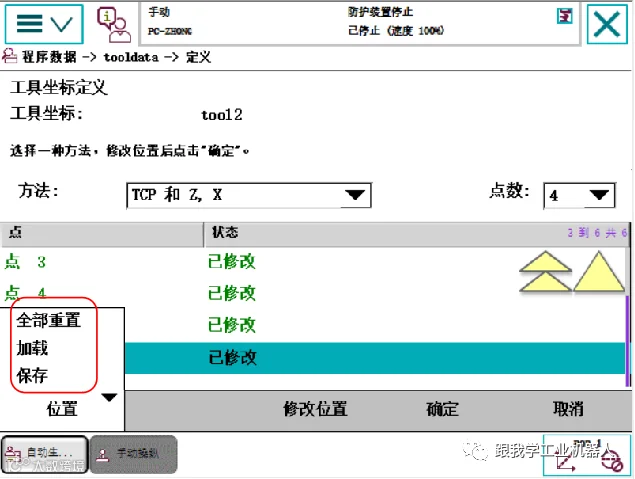
选择“延伸器点Z”,恢复机器人至参考点姿态后移除尖端工具。垂直向下移动机器人一段距离,点击“修改位置”设定Z轴负方向,最后点击“确定”完成定义。
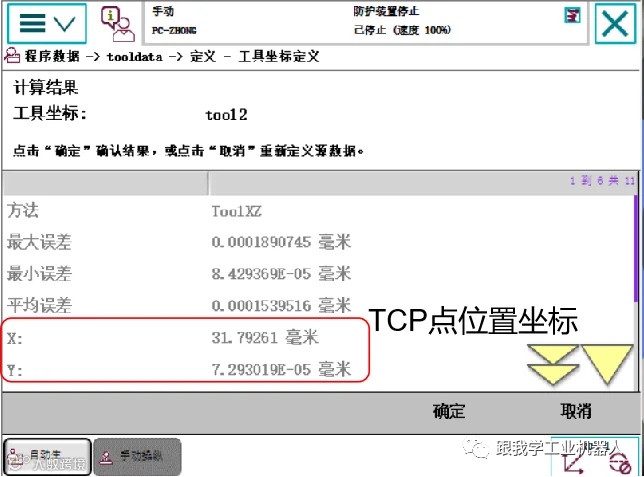
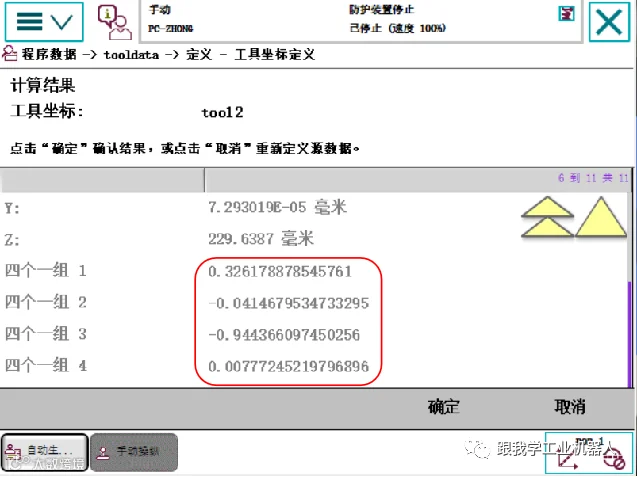
完成坐标系计算与验证
控制器将自动计算TCP位置及工具坐标方向。新定义的TCP基于默认tool0坐标系,方向由四元素表示。
应用与验证
选择已定义的工具坐标系进行使用或方向验证,按图示设置即可实现工具姿态保持一致的操作体验。