
安信可雷达模组Rd-03D已经上市,该雷达采用一发两收的天线,可以实现目标跟踪,实现对区域内目标测距、测角和测速。可用于智能控制空调、风扇等家电运行、智能马桶、感应灯、台灯、镜子灯、智能调节屏幕亮度等各行业场景中。
产品介绍:多人轨迹怎么识别?这块雷达模组能做到!
产品资料:https://docs.ai-thinker.com/rd-03

本应用示例使用STM32解析Rd-03D的串口数据,检测人体距离雷达的角度,根据不同角度点亮不同的灯珠:-60度到-20度点亮 LED1,-20度到20度点亮LED2,20度到60度点亮LED3。
一、Rd-03D引脚说明

J1引脚说明:
J#PIN# |
名称 |
功能 |
说明 |
J1PIN1 |
5V |
电源输入 |
连接串口转接板5V |
J1PIN2 |
GND |
接地 |
连接串口转接板GND |
J1PIN3 |
TX |
UART_TX |
连接串口转接板RXD |
J1PIN4 |
RX |
UART_RX |
连接串口转接板TXD |
J1PIN5 |
DP |
烧录数据正信号 |
若使用4Pin的连接器,则该引脚未使用 |
J1PIN6 |
DM |
烧录数据负信号 |
若使用4Pin的连接器,则该引脚未使用 |
J2引脚说明:
J#PIN# |
名称 |
功能 |
说明 |
J2PIN1 |
5V |
电源输入 |
5V |
J2PIN2 |
DM |
烧录数据负信号 |
- |
J2PIN3 |
DP |
烧录数据正信号 |
- |
J2PIN4 |
DEBUG |
调试串口TXD |
用于调试固件 |
J2PIN5 |
GND |
接地 |
- |
J2PIN6 |
TX |
UART_TXD |
连接串口转接板RXD |
J2PIN7 |
RX |
UART_RXD |
连接串口转接板TXD |
二、软件设计框架

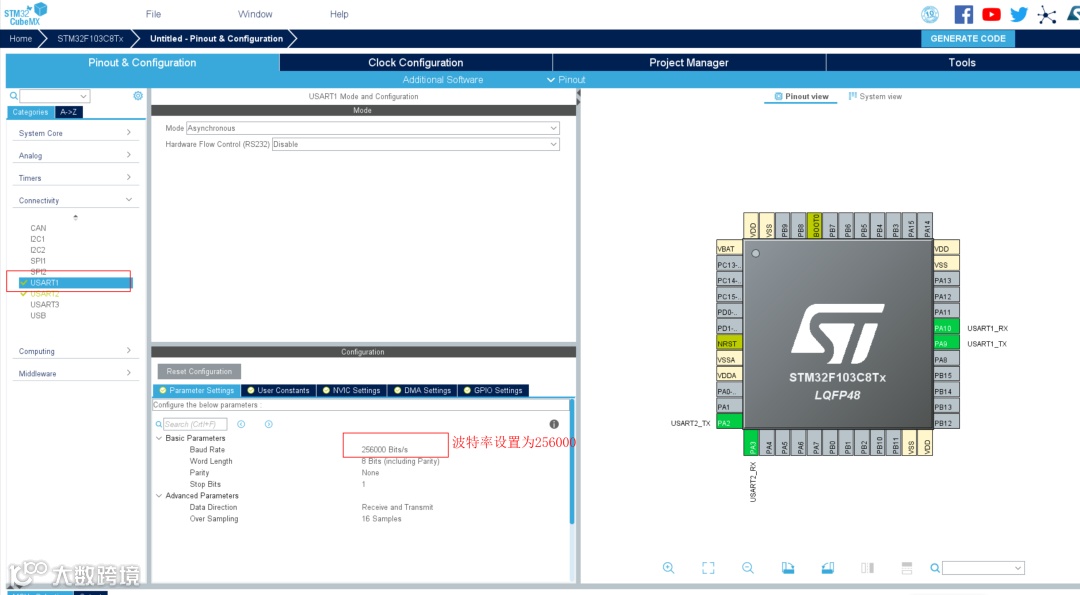
三、STM32F103C8T6使用CubeMX搭配HAL库配置
打开CubeMX,选择STM32F103C8T6。
选择两个串口,分别是串口1和串口2,PA9为USART1_TX,PA10为USART1_RX,PA2为USART2_TX,PA3为USART_RX。
选择异步通讯,勾选中断,注意:串口1的波特率为256000,串口2波特率为115200。

设置GPIO口



四、STM32与Rd-03D和LED灯的接线
Rd-03D |
STM32 |
LED |
||
5V |
— — |
5V |
— — |
|
GND |
— — |
GND |
— — |
LED1\2\3 负极 |
TX |
— — |
PA10 |
||
RX |
— — |
PA9 |
||
PA11 |
— — |
LED1正极 |
||
PA12 |
— — |
LED2正极 |
||
PA15 |
— — |
LED2正极 |
五、串口数据处理
Rd-03D的串口数据
帧头部 |
帧内数据 |
帧尾部 |
AA FF 03 00 |
目标1信息 目标2信息 目标3信息 |
55 CC |
数据示例:AA FF 03 00 0E 03 B1 86 10 00 68 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 55 CC
红色部分表示目标1的信息,蓝色表示目标2的信息,绿色表示目标3的信息。
本示例展示解析单目标模式下对角度信息进行解析,所以需对单个目标内的数据进行解析(即目标1),其中单个目标具体包含内容如下:
目标 x 坐标 |
目标 y 坐标 |
目标速度 |
像素距离值 |
signed int16类型;最高位1对应正坐标,0对应负坐标;其余15位代表x坐标绝对值,单位mm |
signed int16类型;最高位1对应正坐标,0对应负坐标;其余15位代表y坐标绝对值,单位mm |
signed int16类型;最高位1对应正向速度,0对应负向速度;其余15位代表速度绝对值,单位cm/s |
Uint16类型;单个像素距离值,单位mm。 |
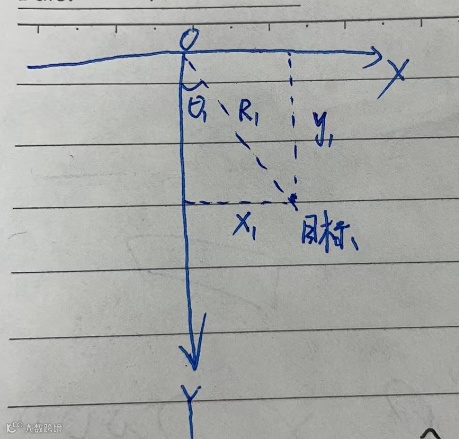
根据目标X,Y坐标数据帧说明可知,若像上述数据示例,模组将目标1的角度数据转换为相关坐标信息的过程展示如下:
目标1x坐标:OxOE+Ox03*256= 782
0-782= -782 mm
目标1y坐标:OxB1+Ox86*256 = 34481
34481-2^15= 1713 mm
六、STM32数据处理
具体实现代码(部分截图,详情请点击“阅读原文”查看原贴)

七、效果演示
八、源码地址
原贴地址:STM32驱动安信可RD-03D实现不同角度点亮不同LED灯

2、AiPi-Radar-Monitor 雷达检测站(Rd-03D)
开发资料
官方教程
安信可官网
.gif")