

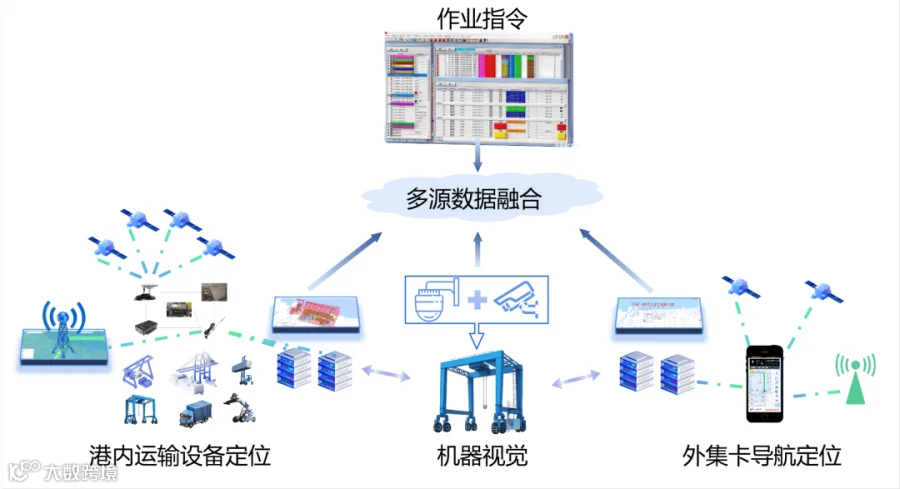
近日,公司联合智港通共同研发的车路协同系统,成功上线并稳定运行!该系统采用“远控龙门吊视觉感知+集卡卫星定位数据+车辆终端到达数据+TOS作业指令数据”多源数据融合技术,精准破解堆场环境下集卡定位漂移、到场信号缺失的行业痛点,为智慧港口建设提供了可复制、可推广的解决方案。
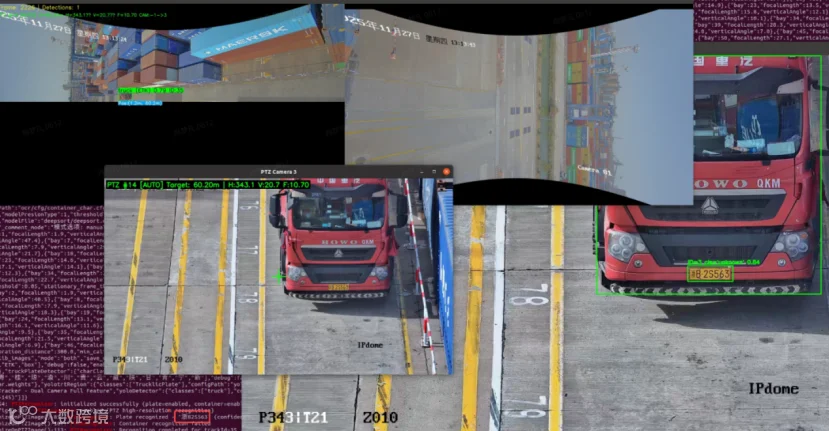
识别车牌画面

(左)西侧视角画面(右)东侧视角画面
在堆场远控作业中,指令自动派发高度依赖集卡卫星定位与电子围栏触发信息——这也曾是影响远控作业的“老大难”:集卡进入堆场后,远控龙门吊有时“不动弹”,或是出现“后到先做”的“插队”情况,大多是进场围栏触发缺失导致。
外集卡未开启导航、箱区内信号遮挡、硬件接触不良等问题,都会造成定位数据异常、触发信号丢失,进而引发无效跳台、设备空等、堆场拥堵等一系列连锁反应,不仅拖慢作业节奏,还限制了码头自动化水平的提升。如何实现远控堆场内集卡的精准感知,成为智慧港口建设中亟待破解的关键课题。
一、给龙门吊装“智能眼睛”,感知能力拉满
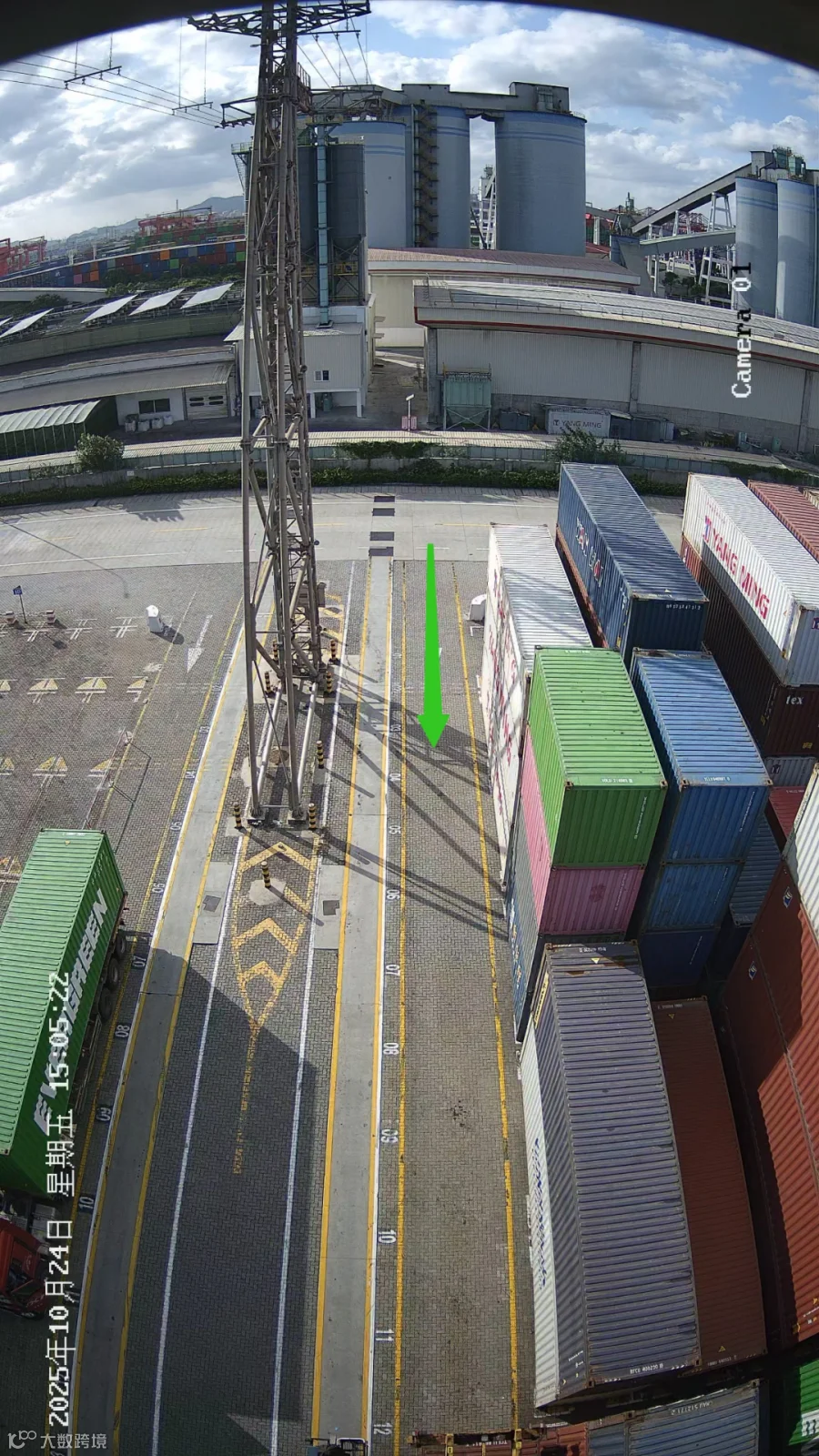
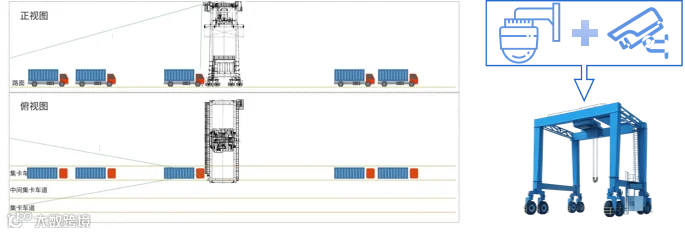
重点提升远控龙门吊单机感知能力,在273#龙门吊大梁位置加装摄像头,结合AI视觉算法,实现对作业道内集卡的贝位级精准感知。这就相当于给龙门吊新增了一双“火眼金睛”,大幅增强单机感知水平,真正实现“走到哪、看到哪、管到哪”,彻底摆脱对单一定位信号的依赖。
项目团队搭建多源融合决策引擎,将视觉数据、电子围栏、作业指令等多维信息深度融合,结合集卡时空行为特征进行交叉验证与逻辑纠偏。这一设计有效消除了单一数据源带来的噪声和感知盲区,即便在雨雾等复杂工况下,系统也能保持高稳定性。
三、优化指令算法,派发更精准高效
对指令派发算法进行升级迭代,将原来的堆场前10贝位围栏单一触发,优化为“到场+到位”二级触发模式:前10贝位围栏触发“到场”信号,目标作业贝位±2贝位围栏触发“到位”信号,为集卡到达指令排序提供更精准的判断依据,实现指令的精准激活、派发。
值得一提的是,系统将感知能力直接部署在远控龙门吊执行端,适配各类远控堆场场景——实现无论龙门吊前往哪个区域作业,都能实时感知对应作业车道内的集卡抵达信息,灵活性拉满。

如今,车路协同系统可自主完成集卡到场、到位信息的动态感知与上报,自动激活作业指令,结合远控龙门吊自动行走、自动抓箱的能力,在堆场侧成功构建起“感知——融合——决策——执行”的全流程单机智能作业体,实现作业全流程自动化、精准化。
为科学、系统地评估车路协同系统运行效果,研发团队通过构建一套全面量化的指标体系,分别从视觉感知、多源融合、指令派发等多个维度开展效果评估,以数据驱动算法迭代优化。
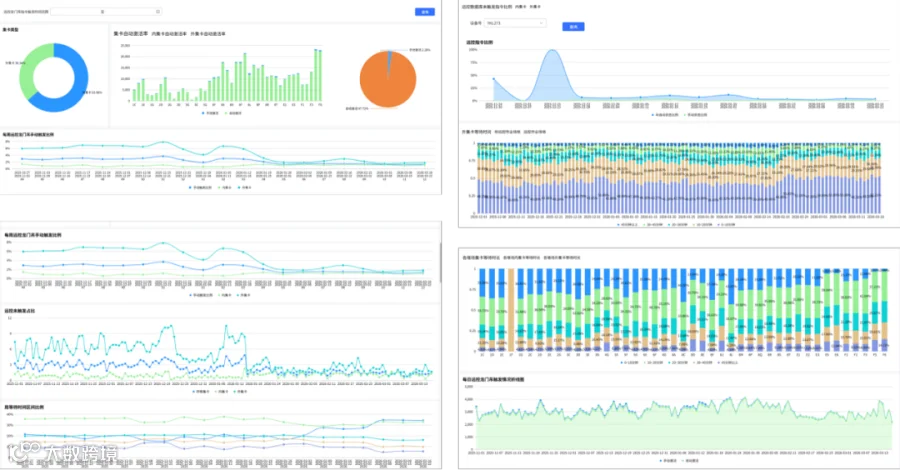
系统上线后,全场远控外集卡指令触发成功率由94%提升至98%;加装高精度摄像头的远控龙门吊,实现内外集卡精确到贝的全量感知,因集卡定位问题导致的跳台率下降超50%。
本次车路协同系统的研发探索,有效验证了依托多维数据融合感知的全流程自动化龙门吊智能体这一技术思路的可行性和有效性。后续将采用“逐台改造、连点成线、织线成网”的实施路径,逐步规模化推广落地,助力公司在数智化转型的道路上行稳致远。

编辑 | 陈远
校对 | 卢小洲
审核 | 李军
