

在工业打磨领域,“手感” 与 “精度” 一直是老师傅们的立身之本,而如今,斯帝尔打磨机器人凭借PolishX 柔性力控系统与 Force6D X 六维力传感器力控技术,正将这种人类工匠的 “娴熟手法” 转化为工业级的智能方案,解决传统打磨的行业痛点。
一、传统打磨的 “痛点”,斯帝尔用 “力控智慧” 破解
打磨作业中,质量不稳(不均匀压力导致缺陷)、编程繁琐(频繁重新示教)、依赖工装(高精度夹具成本高)、良率难控(依赖人工经验) 等痛点长期制约效率与品质。

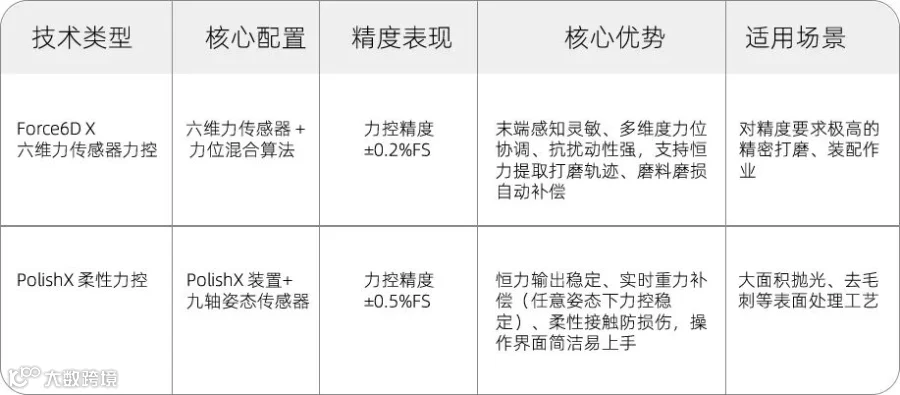
- Force6D X 六维力传感器力控:
集成力 / 力矩传感器与先进力位混合控制算法,配备六维力传感器实时感知接触力,通过智能 “手感” 算法(力位混合控制动态调整位置),再结合工艺软件包(内置工艺库简化参数设置),实现 “灵敏末端感知、高精度力控、多维力位协调”,力控精度达 ±0.2%FS(全量程的0.2%),如同给机器人装上 “精密感知神经”。 - PolishX 柔性力控装置:
搭载自研 PolishX 柔性力控装置,将气动 / 电动执行机构、九轴姿态传感器等高度集成,具备恒力控制、实时重力补偿、柔性接触、操作简单高效、实时监控五大核心优势,力控精度达 ±0.5%FS(全量程的0.5%),可根据需求输出固定方向推力 / 拉力,让打磨机器人如老师傅般 “力道均匀、灵活适配”。
二、两种力控技术,各显神通适配多元场景
三、从 “机器作业” 到 “工匠级智能”,斯帝尔力控重塑打磨价值
无论是 Force6D X六维力传感器力控的 “精密触觉”,还是 PolishX 柔性力控装置的 “柔性巧劲”,斯帝尔打磨机器人都在重新定义工业打磨的 “智能手感”:
- 品质端:告别人工经验依赖,实现压力均匀、轨迹精准的一致性打磨,良率与稳定性跃升至新高度;
- 效率端:简化编程流程(拖动示教、工艺库一键设置),摆脱对高精度工装的依赖,大幅降低时间与成本投入;
- 场景端:从精密零部件到大型工件表面处理,多元力控方案覆盖打磨、抛光、去毛刺等全工艺环节。
当工业机器人拥有了 “老师傅的娴熟手法”,打磨作业的智能化变革已然到来。斯帝尔 PolishX 柔性力控系统与Force6D X六维力传感器力控技术,正以 “力” 为桥,连接起工业自动化与工匠级品质的未来。
